Hudde: Hörakustik: 3 Mittelohr
3-1
3 Mittelohr 3.1 Anatomie und Physiologie.............................................................................................. 3-1 3.2 Elektromechanische Analogien ...................................................................................... 3-4 3.3 Eindimensionale Modelle ............................................................................................. 3-10 3.4 Übertragungsfunktionen und Impedanzen.................................................................... 3-14 3.5 Räumliche Ossikelschwingungen, Columella-Mittelohren .......................................... 3-18 3.1 Anatomie und Physiologie Das Mittelohr ist gegenüber dem Außenohr bereits erheblich feiner strukturiert, wenn auch längst nicht so fein wie das Innenohr. Hier ist die letzte Stufe, in die sich operativ eingreifen lässt, weil es "feinmechanisch" noch handhabbar ist. Dies macht das Mittelohr medizinisch besonders interessant. Die für das akustomechanische Verhalten wesentlichsten Elemente sind das Trommelfell und die Ossikelkette samt ihrer Lagerung durch Bänder und Muskeln. Im Folgenden sind einige Einzelheiten und Daten angegeben. Trommelfell Das Trommelfell, der "Eingang" zum Mittelohr, ist gleichzeitig dessen kompliziertester Teil. Es hat die Aufgabe, den Schalldruck am Gehörgangsende in eine Kraft umsetzen und diese an die Gehörknöchelchenkette weiterzuleiten. Gebildet wird es durch eine Haut, die trichterförmig (Öffnungswinkel ca. 120°) nach innen zum Umbo ("Nabel"), der etwas exzentrisch liegt, gezogen ist. Das Trommelfell ist ein stark unsymmetrisches Element: • Es liegt schräg im Gehörgang. Seine Grundfläche (Öffnungsfläche des Konus) ist um etwa 45° zur Gehörgangsachse geneigt. Ein vom Umbo nach außen zeigender, senkrecht zur Grundfläche des Trommelfells stehender gedachter Pfeil zeigt nach unten und außen. • Es ist am Rand unterschiedlich straff eingespannt. Im unteren Teil ist die Einspannung in einer Rinne (Sulcus tympanicus) recht fest, der zugehörige Teil des Trommelfells wird als Pars tensa bezeichnet. Im oberen Teil fehlt etwa 1/4 der Rinne und das Trommelfell ist nur schlaff eingespannt (Pars flaccida). • Auf der Rückseite des Trommelfells ist das erste der drei Gehörknöchelchen, der Malleus fest angewachsen. Die Kopplungsfläche wird durch den Hammergriff (Manubrium mallei) bestimmt, der zwischen dem Umbo und dem oberen Rand des Trommelfells (im Bereich der Pars flaccida) angewachsen ist. • Die Haut ist inhomogen. Sie besitzt eine Faserstruktur aus radialen und zirkulären Fasern unterschiedlicher Dicke. Das Trommelfell kann teilweise mit Hilfe eines Otoskops direkt inspiziert werden. Wegen einer dünnen Schleimhaut erscheint es im gesunden Zustand glänzend. Die Ansatzfläche des Hammergriffs ist deutlich von außen erkennbar. Einige Daten zum Trommelfell: • Dicke (pars tensa): 30-90 μm, • Dicke (pars flaccida): bis über 200 μm, • mittlerer max. Durchmesser: 9,8 mm, • mittlerer min. Durchmesser: 8,3 mm • Grundfläche: 60 mm2 • Masse: 20 mg. Auch bei sehr niedrigen Frequenzen kann das Trommelfell nicht wie ein Kolben schwingen, da es am Rand eingespannt ist. Bei höheren Frequenzen treten komplizierte Schwingungsmuster auf, die erstmalig von TONNDORF und KHANNA 1972 gemessen wurden (Abb. 3.1-1).
Hudde: Hörakustik: 3 Mittelohr
3-2
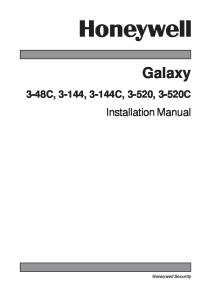
Abb. 3.1-1: Links: An menschlichen Felsenbeinpräparaten gemessene Schwingungsmuster des Trommelfells bei verschiedenen Frequenzen. Rechts: Interpretation einer Messung bei 525 Hz und 121 dB als Auslenkungen, Zahlenangaben in 100 nm (aus TONNDORF/KHANNA 1972)
Man erkennt deutlich, dass auch bei niedrigen Frequenzen keine einfache Membranschwingung vorliegt, sondern eine durch den Hammergriff in zwei Teile geteilte Schwingungsform. Die größten Auslenkungen treten jeweils etwa in der Mitte der freien Trommelfellflächen auf. Der Hammer schwingt deutlich schwächer. Bei höheren Frequenzen zerfallen die Schwingungsmuster immer stärker, oberhalb von 5 kHz sind keine einfachen Schwingungsformen mehr zu finden. Paukenhöhle Hinter dem Trommelfell befindet sich die Paukenhöhle (Cavum tympani, tympanic cavity), die die Ossikelkette aufnimmt. Sie ist mit Schleimhaut ausgekleidet. Die eigentliche Paukenhöhle hat nur ein Volumen von 0,5 - 0,8 cm3, im oberen Teil schließt sich hinter einer Verengung jedoch eine weitere größere Kammer, das Antrum an, dessen Größe ausgesprochen starken interindividuellen Schwankungen unterliegt. Das Volumen der gesamten Höhle schwankt so zwischen 2 cm3 und 20 cm3. Das Antrum liegt im Mastoid. Es ist von den pneumatischen Zellen umgeben, die über Kanäle mit ihm in Kontakt stehen. Da das Antrum wiederum mit der Paukenhöhle in offener Verbindung steht, bewirken alle pneumatischen Zellen gemeinsam eine Vergrößerung der Nachgiebigkeit des Luftvolumens hinter dem Trommelfell. Durch die engen Kanäle, die die pneumatischen Zellen mit dem Antrum und das Antrum mit der Paukenhöhle verbinden, entstehen akustische Verluste, die das Auftreten ausgeprägter Hohlraumresonanzen verhindern. Durch die trichterförmige Einziehung in die Paukenhöhle kommt das Trommelfell der Rückwand auf etwa 2 mm nahe, da die Rückwand wegen der basalen Schneckenwindung eine Ausbauchung (Promontorium) besitzt. Etwas oberhalb des Promontoriums befindet sich das ovale Fenster, unterhalb in einer kleinen Bucht liegt das runde Fenster. Im ovalen Fenster befindet sich die vom Ringband (Ligamentum anulare stapedis) eingefasste Fußplatte des Stapes. Das in Wirklichkeit eher dreieckige "runde" Fenster ist durch die "RundfensterMembran" nachgiebig verschlossen, da sonst eine Bewegung der Perilymphe im Innenohr und damit auch eine Bewegung der Stapesfußplatte nicht möglich wäre. In den unteren Teil der Paukenhöhle mündet ferner die Eustachische Röhre ("Tube", Tuba auditiva, Ohrtrompete). Sie hat für die Funktion des Mittelohres eine ganz erhebliche Bedeutung. Durch kurzzeitiges Öffnen beim Gähnen oder Schlucken stellt sie eine Verbindung zum Rachenraum her, die wiederholt für einen Druckausgleich zwischen Vorder- und Rückseite des Trommelfells sorgt. Dadurch wird das Trommelfell nicht zusätzlich vorge-
Hudde: Hörakustik: 3 Mittelohr
3-3
spannt, so dass das Mittelohr seine maximale Empfindlichkeit behält. Im Normalfall ist die Tube geschlossen und somit akustisch unwirksam. Vom medizinischen Standpunkt ist die "Belüftung" der Paukenhöhle über die Tube sehr wichtig: eine schlecht belüftete Paukenhöhle führt zu starken Störungen des Gleichgewichts der Schleimhäute und endet häufig mit einer der gefürchteten chronischen Formen der Mittelohrentzündung (Otitis media). Gehörknöchelchen (Ossikelkette) Die Ossikelkette, die Gesamtanordnung der drei Gehörknöchelchen "Malleus" (Hammer), "Incus" (Amboss) und "Stapes" (Steigbügel), stellt die Verbindung zwischen dem Trommelfell und der Perilymphe des Innenohres her. Ihre Form und ihre Aufhängung durch fünf Bänder und zwei Muskeln zeigt Abb. 3.1-2. Der Hammerstiel ist vom "Umbo", dem Nabel des Trommelfells bis zu seinem "Hals" (Collum mallei) am Trommelfell festgewachsen. Das Trommelfell stellt somit neben den Bändern und Muskeln einen wesentlichen Teil der Lagerung dar. Abb. 3.1-2: Die Ossikelkette und ihre Lagerung durch Bänder und Muskeln
Malleus und Incus sind durch das "incudomalleare" Gelenk verbunden, das bei Schwingungsamplituden, die bei "normalen" Schalldrücken auftreten, als starr betrachtet werden kann. Bei größeren Bewegungen (etwa beim Schnäuzen, Gähnen oder bei schnellen Änderungen der Höhe wie beim Fliegen oder in einer Seilbahn) wird das Gelenk beweglich. Das Incudomalleargelenk bildet also einen sehr effektiven Überlastschutz. Das Incudostapedialgelenk (zwischen Incus und Stapes) ist in der Hauptrichtung der Kraftübertragung vom "Processus" lenticularis" zum Stapesköpfchen recht hart, in laterale und rotatorische Richtungen um dem Mittelpunkt des Gelenks jedoch sehr nachgiebig. Dies führt zu einer hohen Flexibilität der Ossikelkette, die wesentlich zu den günstigen Eigenschaften (Robustheit, geringe Empfindlichkeit gegenüber Veränderungen und Störungen, guter Schutz gegenüber dem Einfluss von Schädelschwingungen, siehe Kap. 3.5). Einige Daten zu den Gehörknöchelchen: • Malleus: Masse 25 mg, Länge 8 mm, davon 5 mm Manubrium, Winkel zwischen Kopf und Manubrium 140°. • Incus: Masse 28 mg, Länge des Crus breve 5 mm, Crus longum 7 mm, Winkel zwischen den Fortsätzen 100°. • Stapes: Masse 3 mg, Höhe 3,5 mm, Fußplattenlänge 3 mm, -breite 1,4 mm, -fläche 3 mm2. Bei niedrigen Frequenzen unter etwa 1 kHz werden die Schwingungen der Ossikelkette vor allem durch die Aufhängung der beiden Hauptachsenbänder (hinteres Incusband und vorderes Hammerband) bestimmt. Dadurch ergibt sich eine Rotationsachse, die so genannte "Hauptachse", die in Abb. 3.1-2 eingetragen ist. Die rotatorische Bewegung von Malleus und Incus passt nur deshalb zu einer kolbenförmigen Anregung des Stapes, weil das Incudostape-
Hudde: Hörakustik: 3 Mittelohr
3-4
dialgelenk die Ausgleichsbewegung aufnehmen kann. Der Stapes bewegt sich nur bei niedrigen Frequenzen annähernd kolbenförmig. Bei höheren Frequenzen treten deutliche laterale Bewegungen des Köpfchens auf. Wegen der geringen Abmessungen des hinter dem Stapes liegenden mit Perilymphe gefüllten Vestibulums wirkt sich jedoch nur die Bewegung senkrecht zur Fußplatte nennenswert auf den dort erzeugten Druck aus. Man muss klar zwischen einem quasistatischen Verhalten (mit in der Regel höheren Auslenkungen) und dem hier vor allem interessierenden dynamischen Verhalten unterscheiden. Viele Messfehler und daraus resultierende falsche Vorstellungen sind dadurch entstanden, dass man, um beobachtbare Schwingungen zu erhalten, so hohe Pegel verwendete, dass die Auslenkungen eine Größe annahmen, die im natürlichen Fall nur quasistatisch auftreten. Durch den Schlupf der Gelenke bei großen Auslenkungen entstehen zum Teil völlig andere Bewegungsformen. Die mehr oder weniger starre Einheit, die insbesondere Malleus und Incus dynamisch bildet, wird aufgebrochen. Dynamisch sind die Bewegungen dagegen außerordentlich klein. Bei niedrigen Frequenzen erzeugt ein Schalldruck von 1 Pa am Trommelfell eine Stapesauslenkung von nur etwa 20-30 nm. 1 Pa ist bereits ein recht hoher Schalldruck, entsprechend einem Schalldruckpegel von 94 dB SPL. An der Hörschwelle (20 μPa bei 1 kHz) folgt daraus der fast unglaubliche Wert von etwa 0,6 pm! Der Schall gelangt nicht nur auf dem "gewollten" Weg über die Ossikelkette und das ovale Fenster zum Innenohr, sondern auch über das runde Fenster. Unter normalen Bedingungen ist der Anteil über das runde Fenster zu vernachlässigen. Bei fehlender Kette löschen sich die beiden gleichphasigen, jedoch gegensinnig auf die Cochlea wirkenden Schallanteile, weitgehend aus. Das führt zu einem Hörverlust von ca. 50-60 dB. Man darf dem Mittelohr aber nicht eine Empfindlichkeitserhöhung in dieser Größenordnung zusprechen, da ein einfaches Abtrennen des runden Fensters vom Rest der Paukenhöhle den Hörverlust bereits auf maximal rund 25 dB (frequenzabhängig) verringert. Die Abdeckung des runden Fensters wird in der Mittelohrchirurgie tatsächlich angewandt, wenn sich die Ossikelkette nicht operativ rekonstruieren lässt. Die verbleibende Verstärkung von bis zu 25 dB ist tatsächlich dem Mittelohr zuzuschreiben. Zur Einschätzung dieses Wertes sei gesagt, dass eine bis zu 10 dB gegenüber der Norm angehobene Hörschwelle audiometrisch noch als "normal" angesehen wird. Der durch den Wegfall des Mittelohrs entstehende Hörverlust ist also relativ klein, auf jeden Fall problemlos durch ein Hörgerät zu kompensieren. Die wesentliche Funktion des Mittelohres besteht darin, die in den Gehörgang einfallende Schallwelle effektiver in die Perilymphe des Innenohrs einzukoppeln. Es bildet also eine Art "Anpassungsübertrager", der das niedrige Impedanzniveau in Luft an das höhere Impedanzniveua in den Innenohrflüssigkeiten anpasst, allerdings nur in einem begrenzten Frequenzbereich um die Haupt-Mittelohrresonanz herum. Außerhalb dieses Bereichs bestimmen unvermeidbare elastischen Elemente und träge Massen das Übertragungsverhalten. 3.2 Elektromechanische Analogien Um die Funktion des Mittelohrs behandeln zu können, benötigen wir Grundkenntnisse der Schwingungsmechanik. Die tatsächlichen Verhältnisse sind nicht leicht zu modellieren bzw. zu berechnen, da die Schwingungsformen des Trommelfells und der Gehörknöchelchen sich frequenzabhängig stark verändern (Kap. 3.5). Trotzdem macht es Sinn, vereinfachte zu Modelle zu benutzen, um die grundsätzlichen Übertragungseigenschaften des Mittelohrs auch mathematisch nachvollziehen zu können. Nur so kann man die Funktion des Mittelohrs verstehen. Ähnlich wie bei der Vorgehensweise zur Behandlung einfacher akustischer Systeme kann man auch bei mechanischen Schwingungssystemen eine Analogie zur Elektrotechnik entwickeln. Dabei ist die Ausgangssituation schwieriger, weil ein Punkt in einem mechanischen System im allgemeinsten Fall sechs Freiheitsgrade im Raum hat: er kann sich in drei
Hudde: Hörakustik: 3 Mittelohr
3-5
kartesische Richtungen rein translatorisch bewegen und er kann um drei orthogonale Achsen rein rotatorisch gedreht werden, ohne seine Position zu verlassen. Die dabei auftretenden Kräfte und Momente sind ebenso wie die Vibrationsgrößen Vektoren. Mechanische Systeme tendieren daher zu recht komplizierten Schwingungsformen, wenn nicht - wie in den meisten technischen Systemen - Lager und Führungen die Freiheitsgrade beschränken. Mit den Analogien kann man nur rechnen, wenn man annehmen kann, dass die Vibration eines bestimmten Punktes des mechanischen Systems durch einen einzigen Freiheitsgrad, also nur eine translatorische oder rotatorische Richtung, gegeben ist. Die translatorischen Bewegungen werden durch Komponenten der Auslenkung ξ, die rotatorischen durch Komponenten der Winkeldrehung ϕ beschrieben. Durch Lager und andere Randbedingungen kann die Anzahl der Freiheitsgrade bis auf Null (das ist der Fall der vollständigen "Festbremsung") eingeschränkt werden. Die translatorischen Schwinggeschwindigkeiten nennt man Schnellen. Sie werden hier mit v bezeichnet. Die rotatorischen Schnellen sind Winkelgeschwindigkeiten, die wir mit Ω bezeichnen. Die Analogien beschreiben – so wie die elektroakustische Analogie – zunächst nur Systeme mit konzentrierten Elementen. Die mechanischen Wirkungen werden also trotz einer in der Realität endlichen räumlichen Ausdehnung der Elemente durch äquivalente Punktelemente beschrieben. Wir betrachten hier nur sehr einfache mechanische Systeme und beschränken uns auf kleine Schwingungen um eine Ruhelage, "Vibrationen" genannt. Nur unter dieser Voraussetzung sind mechanische Systeme linear. Die zweite Voraussetzung ist die bereits genannte Beschränkung auf einen einzigen Freiheitsgrad an jedem betrachteten Punkt. Die Vibration kann damit entweder durch eine rein translatorische Bewegung in einer festen Richtung oder eine rein rotatorische Schwingung um eine feste Drehachse beschrieben werden. Für beide Fälle lassen sich elektromechanische Analogien angeben. Die Voraussetzungen seien noch einmal zusammengefasst: • kleine Schwingungen um eine Ruhelage (Vibrationen), • eindimensionale Bewegung (entweder rein translatorisch oder rein rotatorisch), • a priori festgelegte Bewegungsrichtung. Bei nach den Analogiebeziehungen aufgestellten Netzwerken bedeutet die Eindimensionalität nicht unbedingt, dass an jedem Tor gleichartige Größen auftreten müssen. Man kann also durchaus Netzwerke angeben, bei dem an einem Tor eine translatorische Schnelle in xRichtung, an einem anderen eine translatorische Schnell in y-Richtung und an einem weiteren Tor eine rotatorische Schnelle um die z-Achse auftreten, wenn entsprechende Umlenkungen und Umwandlungen im mechanischen System vorkommen. Um Punkte mechanischer Systeme in Bewegung zu versetzen, benötigt man Kraftgrößen. Zu translatorischen Bewegungen gehören Kräfte F, die in dieselbe Richtung wie die Bewegung zeigen. Zu den rotatorischen Bewegungen gehören Momente M, die um dieselbe Achse wie die Winkeldrehung wirksam werden. In mehrdimensionalen Systemen sind die verschiedenen Bewegungen und Kräfte miteinander verkoppelt. Kräfte rufen dann i. A. auch rotatorische, und Momente auch translatorische Bewegungskomponenten hervor. Translatorische elektromechanische Analogie In eindimensionalen Systemen greifen Kräfte auf Massen, da es sich voraussetzungsgemäß um auf einen Punkt reduzierbare Massen handelt, immer im Schwerpunkt an. Daher ist die resultierende Bewegung rein translatorisch. Sie folgt der Newton-Gleichung F = ma , also
F = jω m ⋅ v .
(3.2-1)
Die Gleichung lässt sich "elektrisch" wahlweise durch die Beziehungen an einem Kon-
Hudde: Hörakustik: 3 Mittelohr
3-6
densator oder an einer Induktivität interpretieren, je nachdem wie man das mechanische Größenpaar (F, v) mit dem elektrischen (u, i) in Analogie bringt. Im Gegensatz zur elektroakustischen Analogie sind beide Analogiebeziehungen begründbar. Um die elektromechanische Analogie sinnvoll anzusetzen, fordern wir jedoch, dass sich die Struktur des mechanischen Netzwerks „strukturtreu“ auf das elektrische abbildet. Abb. 3.2-1: Zur Wahl der translatorischen mechanischen Analogiebeziehungen
Damit wird die Wahl eindeutig, wie Abb. 3.2-1 veranschaulicht. Will man eine Kraft messen, die auf ein mechanisches System wirkt, so muss man die Verbindung auftrennen und einen Kraftmesser in den Zweig schalten. Die Kraft entspricht strukturell also einem elektrischen Strom. Die Schnelle einer schwingen Masse muss relativ zu einem Bezugspunkt gemessen werden. Dies entspricht einer Spannung zwischen zwei Klemmen, also einem Potenzial mit Bezug auf eine Bezugsklemme. Im rechten Teil von Abb. 3.2-1 ist als Beispiel der Bezug auf eine Klemme dargestellt, die einem (im gewählten Inertialsystem) ruhenden Punkt entspricht. Bei der Schwingung einer starren Masse ist dieser Bezug auf die "elektrische Erdung" immer gegeben, weil alle Punkte des starren Körpers gleich schwingen. Eine Masse entspricht also einem Eintor, so wie die akustische Nachgiebigkeit (siehe Abb. 1.5-1). Um zu erkennen, welches elektrische Element der Masse entspricht, bilden wir die mechanische Impedanz. Sie muss als Quotient F / v definiert werden, weil ein großer Widerstand große Kräfte bei kleiner Bewegung bedeutet. Also ergibt sich aus Gl. 3.2-1 Z=
F = jω m ↔ v
i Ns = Yel , Einheit Z mech,trans : . u m
(3.2-2)
Die Entsprechung zeigt eine wesentliche "Komplikation" dieser Analogie: mechanische Impedanzen entsprechen elektrischen Admittanzen und umgekehrt. Aus diesem Grund wird gelegentlich auch die duale Wahl verwendet (historisch sogar als "elektromechanische Analogie 1. Art bezeichnet). Aus Gl. 3.2-2 folgt, dass sich mechanische Impedanzen wie elektrische Admittanzen verhalten: Bei Parallelschaltung addieren sich mechanische Impedanzen, bei mechanischer Reihenschaltung muss die Beziehung für die Parallelschaltung elektrischer Impedanzen verwendet werden. Hinweis: Solange man nicht mit allgemeinen Impedanzen oder Admittanzen, sondern nur mit den sich aus Elementwerten ergebenden Ausdrücken (wie z. B. jωm oder 1/(jωn) rechnet, kann man einfach "elektrisch" rechnen. Kommen allgemeine mechanische Impedanzen vor, so muss man "elektrisch" mit der zugehörigen Admittanz rechnen. Wegen Yel ~ jω m entspricht die Masse einem Querkondensator, so wie dies in Abb. 3.2-2 dargestellt ist. Die Nachgiebigkeit n einer Feder (Kehrwert der Steife s) ist durch die Beziehung zwischen der Längenänderung, also der Differenz zwischen den Auslenkung an beiden Enden A und B, und Kraft definiert. Wenn die Feder masselos ist, ist die Kraft, die auf der einen Seite eingespeist wird, gleich der Kraft, die auf der anderen Seite weiter geleitet wird. Es gilt Δξ = ξ A − ξ B = n ⋅ FA = n ⋅ FB .
Der Übergang zur Schnelle liefert in komplexer Schreibweise
(3.2-3)
Hudde: Hörakustik: 3 Mittelohr vA − vB = jω n ⋅ FA = jω n ⋅ FB
3-7
⇒ ZA
vB = 0
=
1 jω n
↔ Yel ,
(3.2-4)
also eine Längsinduktivität. Der Dämpfer liefert erwartungsgemäß einen Widerstand, der die Proportionalitätskonstante zwischen Schnelle und Kraft ist. Dieser Dämpfungstyp entspricht viskoser Dämpfung oder Dämpfung durch Reibung. Es gibt jedoch auch andere Arten von Dämpfung.
FA = FB = w ( vA − vB ) ⇒ Z A
vB = 0
= w ↔ Yel ,
(3.2-5)
Achtung: Wegen der Analogie zwischen mechanischen Impedanzen und elektrischen Admittanzen entspricht w einem elektrischen Leitwert, nicht einem Widerstand. Damit sind alle Ersatzschaltbilder aus Abb. 6.1-2 erklärt. Jedes Einzelelement ist eine Querimpedanz (Masse m) oder eine Längsimpedanz (Nachgiebigkeit n oder friktiver Widerstand w). Aus den Zweitoren lassen sich beliebig umfangreiche mechanische Netzwerke entwickeln. Abb. 3.2-2: Translatorische elektromechanische Analogie. Oben: Masse, Mitte: Feder, unten: Dämpfer.
Damit sind alle in Abb. 3.2-2 auftretenden Ersatzschaltbilder erklärt. Die Masse ist hier ebenfalls als Zweitor dargestellt, um eine eindeutige Vorschrift zu erhalten, wie sie mit anderen Elementen zusammen geschaltet werden kann. Ist die Masse auf ihrer Rückseite nicht belastet (FB = 0), gilt die Gl. 3.2-2. Aus den Zweitoren lassen sich umfangreiche translatorische mechanische Netzwerke entwickeln. Rotatorische elektromechanische Analogie
Abb. 3.2-3: Rotatorische elektromechanische Analogie. Oben: Masse, Mitte: Feder, unten: Dämpfer.
Die entsprechenden Ersatzelemente der rotatorischen elektromechanischen Analogie zeigt Abb. 3.2-3. Die inertiale Gleichung für rotatorische Bewegungen bzw. Momente enthält statt der Masse das Trägheitsmoment I:
M = jω I ⋅ Ω .
(3.2-6)
Die rotarische Nachgiebigkeit und der rotatorische Widerstand entsprechen den translatorischen Elementen, nur muss man sie sich rotatorisch vorstellen. Es gelten die gleichen Überlegungen hinsichtlich Strukturtreue wie bei der translatorischen Analogie. Auch sind also beim Rechnen die dualen Regeln anzuwenden.
Hudde: Hörakustik: 3 Mittelohr
3-8
Verkopplungen translatorischer, rotatorischer und akustischer Systeme
Momente gehen bei einer – wie vorausgesetzt festen – Drehachse entsprechend dem Abstand l aus Kräften hervor. Dieselbe Länge verknüpft auch die translatorische und die rotatorische Schnelle: M = Fl , Ω = v / l (3.2-7) Translatorische und rotatorische Schwingungen können nur dann gekoppelt werden, wenn die Koppelstelle so weit von der Drehachse entfernt liegt, dass bei kleinen Bewegungen um eine Ruhelage die rotatorischen Bewegungen näherungsweise durch translatorische ersetzt werden können. Die Verknüpfung erfolgt formal durch einen Transformator (linker Teil der Abbildung 3.2-4). Der rechte Teil der Abbildung zeigt die Ersatzschaltung eines für translatorische Größen formulierten Hebels mit einem Hebelverhältnis h. Auch hier tritt ein Transformator auf. Abb. 3.2-4: Links: Transformator zur Verbindung rotatorischer und translatorischer Netzwerkteile. Rechts: Translatorischer Transformator zur Repräsentation eines Hebelverhältnisses h.
Eine translatorische mechanische Impedanz wird daher wie folgt ins Rotatorische transformiert: M Fl F 2 (3.2-8) Z rot = = = l = Z tra l 2 Ω v/l v Bei vielen mechanischen Systemen ist die Voraussetzung, dass sich die Schwingungsformen nicht frequenzabhängig ändern, nicht besonders genau erfüllt. Dies trifft besonders auf nichttechnische Systeme wie das Mittelohr zu. Deshalb wird of mit "effektiven" Bauelementen gerechnet, deren Größe z. B. messtechnisch bestimmt wird. Dadurch kann auch die Größe einer Masse oder Nachgiebigkeit frequenzabhängig werden. Wenn man durch Veränderungen am System die Schwingungsformen verändert, ändern sich - sehr oft erheblich - die Werte der effektiven "Bauelemente" mit. Wir werden bei der Modellierung des Mittelohrs z. B. effektive translatorische Massen für die Ossikel verwenden, obwohl sich die Ossikel großenteils eher rotatorisch bewegen. Es ist daher interesssant, sich die Wirkung einer Verschiebung der Rotationsachse auf die umgerechnete effektive translatorische Masse klarzumachen. 3.2-6: Umrechnung einer rotatorisch bewegten Masse in eine effektive translatorische Masse.
Die Umrechnung einer rotatorisch bewegten Masse in eine äquivalente translatorische Masse wird in Abbildung 3.2-5 erläutert. Der Körper dreht sich um eine feste Achse senkrecht zur Zeichenebene durch den Punkt D. Er hat eine Wiegemasse m. Um die Schwerelinie senkrecht zur Zeichenebene durch den Schwerpunkt C (center of gravity) besitzt der Körper ein Trägheitsmoment IC. Um die tatsächliche Drehachse durch D vermehrt sich das Trägheitsmoment nach dem
Hudde: Hörakustik: 3 Mittelohr
3-9
Steinerschen Satz um ma2, wobei a der Abstand der Drehachsen ist. Am Punkt P tritt wieder eine quasi-translatorische Vibration auf. Eine hier angreifende Kraft F arbeitet auf eine translatorische Massen-Impedanz I (3.2-9) Z m,tra = jω meff = jω 2 l Diese effektive tranlatorische Massenimpedanz verändert sich mit quadratischer Abhängigkeit von der Entfernung des translatorischen Abgriffpunktes von der tatsächlichen Drehachse. Bei Veränderung der Drehachse, wie sie in biologischen Systemen ohne exakte Lagerung fast immer auftreten, ändert sich nicht nur die effektive Masse, sondern in ähnlicher Weise auch die effektive translatorische Nachgiebigkeit. Ein häufig auftretendes Standardsystem ist eine Masse, die federnd mit Verlusten aufgehängt ist. Eine auf die Masse wirkende Kraft wirkt parallel auf alle drei Elemente: sie beschleunigt die Masse m (bzw. das Trägheitsmoment I), spannt die Feder mit der Nachgiebigkeit n (bzw. die rotatorische Nachgiebigkeit N) und überwindet den translatorischen bzw. rotatorischen Widerstand (w bzw. W) eines Dämpfers. Es handelt sich also um eine Parallelschaltung der drei Grundelemente, deren Impedanzen daher addiert(!) werden. Damit ist die Beziehung zwischen Kraft und Schnelle (bzw. Moment und Winkelgeschwindigkeit) ⎞ ⎛ ⎞ ⎛ 1 1 (3.2-10) F = ⎜ jω m + + w ⎟ v , M = ⎜ jω I + +W ⎟ Ω jω n jω N ⎠ ⎝ ⎠ ⎝ Dies kennzeichnet offenbar mechanische Parallelschwingkreise. Sie besitzen wie die analogen elektrischen Reihenschwingkreise Impedanzminima bei Resonanz. Die Resonanzkreisfrequenzen sind 1 1 , ω rot = ω tra = (3.2-11) m⋅n I ⋅N Sie sinken, wenn die Masse (das Trägheitsmoment) oder die Nachgiebigkeit vergrößert wird. Die mechanische Augenblicksleistung ist das Produkt aus F(t) und v(t). Bei der Definition der Scheinleistung kann das Vorzeichen der Blindleistung frei gewählt werden (je nachdem, welche der beiden komplexen Phasoren konjugiert komplex in das Produkt eingeht). Üblich ist die Definition S=
1 * Fv . 2
(3.2-12)
Damit ist die Bewegung einer Masse (die analoge Entsprechung ist ein Kondensator!) mit positiver Blindleistung verknüpft. Entsprechend gilt für rotatorische Schwingungen S=
1 M Ω* . 2
(3.2-13)
Für Berechnungen des Schallempfangs, z. B. mit dem Trommelfell oder mit Mikrofonen, und der Schallabstrahlung, z. B. ebenfalls über das Trommelfell (siehe otoakustische Emissionen, Kap. 4.5) oder über Lautsprecher, Kopfhörer oder Hörgeräte, ist es wichtig, die Kopplung mit dem mechanischen Schwingungssystem zu beschreiben. Dies ist sehr schwierig, wenn das Schall abstrahlende oder aufnehmende System in komplizierter Weise schwingt. Es wird nur dann einfacher, wenn eine starre Membran senkrecht zu ihrer Oberfläche schwingt. Selbst für diesen Fall sind Näherungen notwendig, um einfache mathematische Modelle zu erhalten. Beim Schallempfang muss vorausgesetzt sein, dass Schalldruck und Schallschnelle auf der Membranfläche konstant sind. Dasselbe gilt auch für die Schallabstrahlung. Hinzu kommt hier die Vereinfachung, dass man davon ausgeht, dass die Membran durch eine konzentrierte akustische Impedanz belastet wird. Tatsächlich haben wir in Kap. 1 gesehen, dass
Hudde: Hörakustik: 3 Mittelohr
3-10
bei der Schallabstrahlung in den freien Raum zwischen Nah- und Fernfeld unterschieden werden. Zusätzlich entsteht durch die Interferenz der akustischen Wellen Richtcharakteristiken. Sind die vereinfachten Voraussetzungen gegeben, sind die Verhältnisse an der Membran ausschließlich durch die Kraft F auf die Membran, die Schnelle v der Membran, den Schalldruck unmittelbar vor der betrachteten Seite der Membran, und den Schallfluss unmittelbar an der Membran bestimmt. Die Beziehungen zwischen den genannten Größen sind sehr einfach. Für eine Membran mit der einseitigen Fläche A gilt p = F A , q = vA .
(3.2-14)
Da die Kraftgröße (F bzw. p) in der mechanischen Analogie einem Strom, in der akustischen hingegen einer Spannung zugeordnet ist und das umgekehrte für die Bewegungsgrößen (v bzw. q) gilt, ist das Ersatzschaltbild ein Gyrator mit der Gyrationskonstanten A. bedeutet jedoch keine Nichtreziprozität, wie wir sie von rein elektrischen Netzwerken kennen. 3.2-7: Gyrator zur Kopplung zwischen akustischen und mechanischen Systemen. Die Richtung der Bezugspfeile passt man am besten der betrachteten Übertragungsrichtung an, wenn eine solche überhaupt existiert.
3.3 Eindimensionale Modelle In der Literatur findet man häufig die Aussage, dass das optimale Transformationsverhältnis des Mittelohrs sich aus den spezifischen Wellenwiderständen Z w = ρ c der Luft (ca.
390 Ns/m3) und der Perilymphe (fast wie normales Wasser, ca. 1,5⋅ 106 Ns/m3) berechnet. Da eine Impedanz mit dem Quadrat des Übertragungsfaktors eines Übertragers transformiert wird, sollte demnach der "optimale" Übertragungsfaktor einen Wert von 62 besitzen. Tatsächlich ist diese Rechnung gar nicht anwendbar, da sie nur für den Fall einer ebenen Welle gelten würde, die von einem unendlich ausgedehnten luftgefüllten Teilraum in einen unendlich ausgedehnten (oder reflexionsfrei abgeschlossenen) wassergefüllten Raum übergeht. Auf beiden Seiten des Mittelohrs sind die Bedingungen jedoch gänzlich anders. Der Gehörgang führt zwar näherungsweise eine ebene Welle, er ist aber keineswegs sehr lang. Wie wir im vorigen Kapitel gesehen haben, sind die Reflexionen am Gehörgangseingang für das Übertragungsverhalten sehr wesentlich. Man muss ihn also hinsichtlich des Mittelohrs als eine Quelle mit Innenimpedanz beschreiben. Auf der Seite des Innenohrs ist die Wellenvorstellung gänzlich unangebracht, weil die Abmessungen der im Innenohr wirksamen Kanäle im betrachteten Frequenzbereich fast keine Welleneffekte zulassen. Stattdessen können wir die Verhältnisse gut durch eine konzentrierte Eingangsimpedanz ZC der Cochlea beschreiben. Die Impedanzen auf beiden Seiten weichen also erheblich von den Wellenimpedanzen der beiden Medien Luft und Wasser ab. Die erwähnte Abschätzung des notwendigen Übertragungsfaktors ist also falsch. Ein eventueller mechanischer Übertrager könnte durch ein Hebelverhältnis in der Ossikelkette realisiert werden. Malleus und Incus bilden tatsächlich ein Hebelsystem, das sich niederfrequent um die Hauptachse (Abb. 3.1-2) dreht. Die Schenkel des Hebelsystems sind durch den langen Incusfortsatz und das Manubrium gegeben. Auf dem Manubrium gibt es einen "effektiven" Einspeisungspunkt aus dem Schalldruck umgewandelten Kraft, der etwas weg vom Umbo in Richtung Collum mallei liegt. Der "Ausgang" des zweiten Hebels ist der Processus lenticularis. Beide Hebelarme sind allerdings fast gleich lang, so dass keine nen-
Hudde: Hörakustik: 3 Mittelohr
3-11
nenswerte Abweichung des Hebelverhältnis von eins zu erwarten ist. Die Ossikelkette hat also keine nennenswerte Wirkung als Hebelübertrager. Bei Vögeln und Reptilien ist die Ossikelkette durch eine recht einfache stabförmige Verbindung (Columella) ersetzt. Da die durch die Form der Kette verursachte Hebelwirkung gering ist, ist der akustomechanisch wirksame Unterschied zwischen Ossikelkette und Columella aus dieser Sicht gering. Dies wird auch durch die Einsatzfähigkeit columella-artiger Prothesen beim Menschen bestätigt. Warum der Mensch eine so relativ komplizierte Form der Ossikel besitzt, ist nicht einfach zu begründen, sondern erfordert das Studium der räumlichen Bewegungen (siehe Kap. 3.5). Ein weiteres als Übertrager identifizierbares Element ergibt sich aus den stark unterschiedlichen Flächen von Trommelfell und Stapes-Fußplatte. Das Trommelfell bildet die schallaufnehmende Fläche, die den Schalldruck in eine Kraft auf die Ossikelkette umwandelt. Am Ende der Kette wird die Kraft durch die Stapes-Fußplatte in einen nun hydroakustischen Schalldruck im Vestibulum zurück gewandelt. Das elektromechanische Analogmodell einer solchen Anordnung ist in der folgenden Abbildung dargestellt.
Abb. 3.3-1: Zur Wirkung von zwei mechanisch gekoppelten Flächen als einfachste Näherung der Kopplung zwischen Trommelfellfläche AD und Stapesfußplattenfläche AF. Die Fußplattenfläche arbeitet auf die Flüssigkeiten des Innenohrs. Die dort wirksame hydroakustische Impedanz ist als Cochlea-Impedanz ZC bezeichnet.
Das Übertragungsverhalten vom "Trommelfell" in die Cochlea nach der einfachsten Näherung lässt sich leicht berechnen. Da die "Columella" als masselos angesehen wird, ist die auf die "Stapes-Fußplatte" übertragene Kraft mit der am "Trommelfell" erzeugten identisch. Ebenso sind die Schnellen an beiden Enden der "Columella" identisch, weil diese völlig steif angenommen wird. Damit ergibt sich FD = AD pD = FF = AF pC . (3.3-1) q q vD = D = vF = C AD AF Als Kettenmatrix geschrieben lauten die Gleichungen ⎛ AF ⎞ 0 ⎟ ⎜ p ⎛ pD ⎞ ⎜ AD ⎟ ⎛⎜ C ⎞⎟ . (3.3-2) ⎜ ⎟=⎜ AD ⎟ ⎝ qC ⎠ ⎝ qD ⎠ ⎜ 0 AF ⎟⎠ ⎝ Das entspricht einem akustischen Übertrager, der in der elektroakustischen Analogie als Übertrager mit dem Übersetzungsverhältnis AD/AF beschreibbar ist. Damit ist tatsächlich das Prinzip des grundlegenden Mittelohr-Übertragers gefunden. Der Druck wird vom Trommelfell zur Cochlea in dem gleichen Maße herauf transformiert, wie der Schallfluss herunter transformiert wird. Dies entspricht dem Übergang auf das höhere Impedanzniveau der Coch-
Hudde: Hörakustik: 3 Mittelohr
3-12
lea-Flüssigkeiten im Vergleich zur Luft im Gehörgang. Das Übersezungsverhältnis liegt in der Größenordnung von 18, also weit unter dem oben angegeben (falschen) "Optimalwert" von 62. Aus diesem Grund wurde häufig angenommen, dass es bei Operationen im Mittelohr günstig sei, ein künstlich höheres Hebelverhältnis zu realisieren. Gemäß Gl. 3.3-2 gibt das Flächenverhältnis unmittelbar die Druckverstärkung pC/pD des Mittelohres an. Die erwartete Druckverstärkung liegt somit bei etwa 25 dB. Tatsächlich entspricht dieser Wert ungefähr der maximalen Druckverstärkung beim Menschen, die aber nur im Resonanzbereich des Mittelohres auftritt. Ein bisschen realistischer wird man, wenn man der Verbindung zwischen Trommelfell und Fußplatte, als in Wirklich der an Bändern aufgehängten Ossikelkette, Masse und eine Aufhängungssteife inklusive Verlusten zuspricht. Im Ersatzschaltbild bedeutet dies die Einfügung einer mechanischen Impedanz, die bewirkt, dass die am Trommelfell erzeugte Kraft nicht vollständig an der Fußplatte wirksam wird (Abb. 3.3-2).
Abb. 3.3-2: Zur Wirkung von zwei mechanisch gekoppelten Flächen als einfachste Näherung der Kopplung zwischen Trommelfellfläche AD und Stapesfußplattenfläche AF. Die Fußplattenfläche arbeit auf die Flüssigkeiten des Innenohrs. Die dort wirksame hydroakustische Impedanz ist als CochleaImpedanz ZC bezeichnet.
Die Druckübertragungsfunktion dieses Netzwerks berechnet sich wie folgt. Zunächst erhält man, indem man das Netzwerk von hinten nach vorne durchläuft Z A A pC = Z C qC = Z C AF vF = Z C AF vD = Z C F qD = C F pD . (3.3-3) AD Z D AD Dabei bedeutet ZD wie immer die "Trommelfellimpedanz", also die Eingangsimpedanz der gesamten Schaltung. Diese ist ZD =
Z mech + AF2 Z C . AD2
(3.3-4)
Damit ergibt sich die gesuchte Übertragungsfunktion als Z C ,mech pC Z C AF AD2 Z C AF2 Z C AF AD2 AF AD = = = = . 2 2 2 pD Z D AD Z mech + AF Z C AD Z mech + AF Z C AF AD Z mech + Z C ,mech AF
(3.3-5)
Hierin wurde die ins Mechanische transformierte Cochlea-Eingangsimpedanz verwendet. Zum Flächenverhältnis kommt also noch ein Impedanzverhältnis hinzu. Mit dieser Vorstellung lässt sich ein reales Mittelohr bereits relativ gut beschreiben. Allerdings stellt sich heraus, dass die effektiv wirksame Fläche des Trommelfells stark frequenzabhängig ist. Dies ist wenig verwunderlich, wenn man an die komplizierten Schwingungsmuster nach Abb. 3.1-1 denkt. Um an realistische Werte zu gelangen, muss man nicht nur de effektive Trommelfellfläche AD, sondern sämtliche Netzwerkelemente messtechnisch bestimmen. Es sei in diesem Zusammenhang noch einmal daran erinnert, dass die in Analogiemodellen auftretenden Elementwerte von Massen und Nachgiebigkeiten von der tatsächlichen Schwingungsform ab, sind also nur "effektive" translatorische Werte, die sich ändern, wenn die Schwingungsform verändert wird. In der Realität sind die Schwingungsformen durchaus
Hudde: Hörakustik: 3 Mittelohr
3-13
erheblich frequenzabhängig. Man kann also nicht erwarten, dass Netzwerken mit frequenzunabhängigen Massen und Nachgiebigkeiten die Realität richtig beschreiben. Vielmehr sind die Elementwerte selbst in gewissem Umfang frequenzabhängig. Effektive Elemente gelten also grundsätzlich nur für einen "Arbeitspunkt" des untersuchten Systems. Schneidet man etwa ein die Gehörknöchelchenkette lagerndes Band durch, so ändert sich nicht nur die Nachgiebigkeit der Einspannung der Kette, sondern über die sich ändernde Schwingungsform und Vorspannung prinzipiell alle vorkommenden mechanischen Elemente. Ein Netzwerkmodell kann daher extreme Änderungen im Mittelohr, wie etwa den Fall otosklerotischer Versteifung der Ketteneinspannung im ovalen Fenster oder den Fall einer Kettenluxation nicht korrekt beschreiben. Allerdings gibt ein Netzwerkmodell in beiden Fällen den Trend richtig wieder. Der Sinn von Netzwerkmodellen ist also niemals die genaue Vorhersage des Übertragungsverhaltens individueller Mittelohren, sondern das grundsätzliche Verständnis der beteiligten Mechanismen und der resultierenden Frequenzgänge anhand eines Netzwerkmodells! Um sinnvolle Messungen spezifizieren zu können, benötigt man zunächst ein noch etwas verbessertes Grundmodell (Abb. 3.3-3). In diesem Modell ist anstelle der mechanischen Impedanz Zmech eine etwas allgemeinere Zusammenschaltung angenommen. Hinzu kommt am Eingang eine akustische Impedanz, die die Wirkung der Paukenhöhle bzw. der kompletten Mittelohrhöhlen mit Antrum und pneumatischen Zellen beschreiben soll. Es ist ja die Druckdifferenz zwischen Vorder- und Rückseite, die das Trommelfell mitsamt der Ossikelkette antreibt. Wir wissen zwar bereits, dass es vor dem Trommelfell - außer bei sehr niedrigen Frequenzen - gar keinen konstanten Druck gibt. Es liegt aber nahe, auch hier den bereits zur Definition der Trommelfellimpedanz herangezogenen Trommelfelldruck pD zu verwenden. Auf der Rückseite, also in der Paukenhöhle ist der Druck ebenso wenig konstant. Aufgrund der Längenausdehnung der Höhlen (inklusive Antrum 2-4 cm) treten schon bei Frequenzen ab ca. 1 kHz Welleneffekte auf. Für ein eindimensionales Modell kann man hier nur einen Druck pcav und eine rückseitige akustische Lastimpedanz Zcav (cavity) ansetzen. Der Schallfluss qD des Trommelfells ist das Flächenintegral über die von Punkt zu Punkt variierenden Trommelfellschnellen. Er ist unmittelbar vor und hinter dem Trommelfell identisch. Die drei genannten Größen hängen also über pcav = Zcav qD zusammen. Diese Beziehung ist im Ersatzschaltbild berücksichtigt. Die gewünschte Druckdifferenz Δp = pD - pcav, die das Trommelfell antreibt, tritt am Tor Δ auf.
Abb. 3.3-3: Struktur einer Ersatzschaltung des Mittelohrs. Zwischen dem Tor Δ aus Abb. 3.3-3 und dem Tor I am Incus ist ein allgemeines Zweitor, das Kern-Zweitor K, vorgesehen. Die Tore des Modell sind: D: akustisches Tor "vor dem Trommelfell", Δ: akustisches Tor, an dem die Druckdifferenz am Trommelfell wirksam wird, I: Incus, am Processus lenticularis, S: Stapes-Köpfchen, F: Fußplatte des Stapes, C: Cochlea-Eingang (Vestibulum hinter der Stapes-Fußplatte).
Wegen der Schwierigkeiten, das Trommelfell in einem eindimensionalen Modell zu beschreiben, wollen wir gar nicht erst versuchen, seine Eigenschaften und das Zusammenwirken mit dem Malleus mit Netzwerkmodellen zu beschreiben. Stattdessen benutzen wir die Netzwerkstruktur nach Abb. 3.3-3, die das Trommelfell und den Malleus, sogar inklusive des
Hudde: Hörakustik: 3 Mittelohr
3-14
Incus, durch ein Zweitor ("Kernzweitor") beschreibt, dessen Eigenschaften messtechnisch erfasst werden sollen, ohne eine spezielle Struktur anzunehmen. Der Incus endet, was die Weiterleitung der Kraft betrifft, am Processus lenticularis. Dieser Fortsatz ist über das Incudostapedialgelenk mit dem Stapesköpfchen verbunden. Obwohl das Gelenk in Hauptübertragungsrichtung fast steif ist, wird es in Abb. 3.3-3 durch eine mechanische Impedanz Zis berücksichtigt. Den Punkten vor und hinter dem Gelenk sind die Tore I (Incus) und S (Stapes) zugeordnet. Hinzugekommen ist ferner die Impedanz Zst des Stapes , die neben der Stapesmasse wesentlich auch die Aufhängung durch das Ringband im ovalen Fenster enthält. Die Schnelle von Stapes-Köpfchen vS und Fußplatte vF werden vom Modell als identisch angesehen, was einer einfachen Kolbenschwingung eines starren Körpers entspricht. Obwohl das Kern-Zweitor nicht weiter spezifiziert werden soll, kann man es mit Elementen füllen, die Messergebnisse in gewissem Umfang veranschaulichen können. Eine interpretierbare Wahl der Elemente des Kern-Zweitors ist in Abb. 3.3-44 dargestellt. Abb. 3.3-4: Allgemein anwendbare Interpretation des Kern-Zweitors K durch drei Elemente. Der Gyrator AD beschreibt die effektive Schall aufnehmenden Fläche des Trommelfells. Die akustische Admittanz Yac bewirkt eine endliche Eingangsimpedanz auch bei Festbremsung des Incus. Die mechanische Impedanz Zdmi beschreibt die mechanischen Wirkungen von Trommelfell Malleus und Incus.
Gemäß dieser Interpretation kann die Kettenmatrix des Kernzweitors wie folgt angegeben werden ⎛ 1 ⎜A K= ⎜ D ⎜ Yac ⎜A ⎝ D
⎞ ⎟ Δp F ⎟ , ⎛⎜ ⎞⎟ = K ⋅ ⎛⎜ I ⎟⎞ . (3.3-6) qD ⎠ vI ⎠ Z dmiYac ⎟ ⎝ ⎝ AD + AD ⎟⎠ Auf der mechanischen Seite, also am Processus lenticularis tritt eine mechanische Impedanz Zdmi auf, die die mechanischen Eigenschaften von Trommelfell, Malleus und Incus enthält, und zwar so, wie sie sich am Processus lenticularis darstellen. Ohne eine akustische Admittanz Yac würde ein Festbremsen des Incus (vI = 0) bedeuten, dass auch qD = vI AD zu null wird. Tatsächlich sind dann aber die äußeren Trommelfellteile weiterhin beweglich und führen zu einer endlichen Impedanz. Daraus folgt, dass Yac im Wesentlichen den Einfluss der äußeren Trommelfellteile repräsentiert. Die Elemente des Kernzweitors können direkt messtechnisch bestimmt werden. Z dmi AD
3.4 Übertragungsfunktionen und Impedanzen Im Folgenden sind zunächst Messergebnisse für die in Abb. 3.3-5 definierten Kernelemente wiedergegeben. Primär wurden die Kettenparameter der Kettenmatrix (3.3-6) gemessen, indem der Ausgang bei Kraftmessung festgebremst und bei Schnellemesung ohne Last betrieben wurde. Aus den Kettenparametern lassen sich die Kernelemente leicht berechnen.
Hudde: Hörakustik: 3 Mittelohr
3-15
Abb. 3.4-1: Am Felsenbeinpräparat gemessene und daraus berechnete Kernelemente AD und Zdmi.
Die "effektive Trommelfellfläche" AD, die ja auch als Übertragungsfunktion interpretierbar ist, beeinflusst das Übertragungsverhalten des Mittelohres am stärksten. Die Fläche ist nur bei niedrigen Frequenzen annähernd konstant. Nach einem schwach ausgeprägten Maximum bei 2 kHz fällt AD mit 40 dB/Dekade ab und geht bis etwa auf die Ankoppelfläche des Manubriums zurück. Der Phasengang, der ein mit zunehmender Frequenz wachsendes Nacheilen der Kraft anzeigt, kann so interpretiert werden, dass Kraftbeiträge von periphereren Teilen des Trommelfells das Manubrium später erreichen. Rechts in Abb. 3.4-1 ist Zdmi dargestellt, also die Impedanz, die man am Processus lenticularis misst, wenn das Trommelfell akustisch nicht belastet wird. An das Kernzweitor grenzt - durch das Incudomalleargelenk getrennt - die mechanische Impedanz am Stapesköpfchen an. Diese setzt sich nach Abb. 3.3-3 aus der mechanischen Impedanz Zst des Stapes (inklusive seiner Aufhängung durch das Ringband) und der über die Stapesfußplattenfläche AF umgerechneten akustischen Lastimpedanz des Innenohrs ZC zusammen. Z sc = Z st + Z C ⋅ AF2 = Z st + Z c, mech .
(3.4-1)
Das Gesamt-Übertragungsverhalten des Mittelohrs ist in Abb. 3.4-3 in zwei Übertragungsfunktionen dargestellt, nämlich als Auslenkung der Stapesfußplatte bzw. als im Vestibulum dahinter erzeugter Schalldruck, jeweils bezogen auf den Schalldruck am Trommelfell. Vernachlässigt man die Gelenke und den Einfluss der Höhlenimpedanz Zcav, um übersichtlichere Verhältnisse zu erhalten, so nimmt die die Druck-Übertragungsfunktion dieselbe Form wie bereits in Gl. (3.3-5) an: pC AD Z c , mech A 1 ( jω nc , mech ) + wc , mech + jω mc , mech ≈ ⋅ ≈ D⋅ . pD AF Z sc + Z dmi AF Z gesamt , mech
(3.4-2)
Hudde: Hörakustik: 3 Mittelohr
3-16
Abb. 3.4-3: Links Auslenkungs-Übertragungsfunktion (Stapesschnelle/Trommelfelldruck), rechts Druck-Übertragungsfunktion des Mittelohrs (Druck im Vestibulum/ Trommelfelldruck).
Niederfrequent ist die Druckverstärkung durch das Nachgiebigkeitsverhältnis der Cochlea nc, mech (im Wesentlichen der Membran des runden Fensters) zur Gesamtnachgiebigkeit von Zsc und Zdmi bestimmt. Man erkennt, dass niederfrequent keine Verstärkung auftritt (0 dB entspricht einem Faktor 1). Die Druckverstärkung erreicht im Resonanzbereich um 1 kHz ihr Maximum von etwa 20 dB. Danach erfolgt ein Abfall. Oberhalb von 10 kHz bewirkt das Mittelohr sogar eine Druckabschwächung. Die links in Abb. 3.4-3 dargestellte Auslenkungsübertragungsfunktion hängt mit der Druckübertragungsfunktion gemäß ξS pC AF2 Z C 1 1 1 AD Z c , mech AD = ≈ ⋅ = ⋅ = pD jω AF Z C pD jω AF Z C AF Z sc + Z dmi jω AF Z C AF Z sc + Z dmi =
1 AD jω Z sc + Z dmi
→ ngesamt AD →−
AD ω mges 2
(für niedrige Frequenzen)
(3.4-3)
(für hohe Frequenzen)
zusammen. Niederfrequent ergibt sich also eine Konstante, die proportional zur effektiven Trommelfellfläche und der Gesamtnachgiebigkeit ist. Die Auslenkungs-Übertragungsfunktion beträgt etwa 20-30 nm/Pa. Oberhalb einer schwach ausgeprägten Resonanz folgt ein Abfall mit 40-60 dB/Dekade. Der Abfall ist durch die beteiligten Massen und die Frequenzabhängigkeit der effektiven Trommelfellfläche bestimmt (siehe Gl. 3.4-3). Die eher bescheidene Druckverstärkung durch das Mittelohr mag zu der Frage führen, wie gut unser Mittelohr seinen Zweck erfüllt. Um einer quantitativen Einschätzung näher zu kommen, soll zum Vergleich die sich unter völlig idealisierten Bedingungen einstellende maximal mögliche Druckverstärkung berechnet werden. Dabei ist es sinnvoll, den Gehörgang sofort mit einzubeziehen. Da das Mittelohr die akustische Belastung des Gehörgangs bildet, ist eine Trennung zwischen Gehörgangsanteil und Mittelohranteil nicht möglich. Gehörgang und Mittelohr bilden eine funktionale Einheit. Die Verstärkung muss also auf die äußere Quelle pecE am Gehörgangseingang bezogen werden, d. h. wir interessieren uns für die Druckverstärkung pC/pecE. Das absolute Optimum im Sinne einer maximalen Empfindlichkeit des Gehörs würde erreicht, wenn (a) der äußeren Quelle die maximale Wirkleistung entnommen und wenn (b) diese vollständig ins Vestibulum weiter geleitet würde. Diese Situation träte auf, wenn in der Ersatzschaltung in Abb. 3.4-4 der Gehörgang und das Mittelohr den eintretenden Schall verlust- und reflexionsfrei an die Lastimpedanz ZC des Innenohrs weiter geben würden. Gehörgang und Mittelohr müssten also gemeinsam einen Anpassungstransformator bilden, der die Impedanzen von Quelle (ZecE) und Last (ZC) aneinander anpassen würden. Der Abstand
Hudde: Hörakustik: 3 Mittelohr
3-17
der Beträge liegt etwa in der Größenordnung der Unterschiede der Wellenimpedanzen. Der resultierende optimale Transformator müsste einen stark frequenzabhängigen Übertragungsfaktor und sogar eine Phase besitzen, was nicht mehr einem passiven Element entspricht.
Abb. 3.4-4: Quelle-Last-Bedingungen bei Gehörgang und Innenohr.
Stellt man die oben genannte Forderung ohne Rücksicht auf die Nichtrealisierbarkeit auf, so erhält man unmittelbar folgende Beziehung 2
1 pecE 1 2 = qC Re {Z C } 8 Re {Z ecE } 2
(3.4-4)
und damit zu qC 1 = pecE 2 Re {Z ecE } Re {Z C }
bzw.
ZC pC = . pecE 2 Re {Z ecE } Re {Z C }
(3.4-5)
In Abb. 3.4-5 ist diese Übertragungsfunktion als Referenz dargestellt. Die Abbildung zeigt die Schalldruck-Übertragungsfunktionen von einer äußeren Quelle am Eingang des Gehörgangs zum Vestibulum für den Normalfall und für den Fall eines entfernten Mittelohrs, bei dem der Schall direkt auf das ovale Fenster trifft. Das runde Fenster wurde dabei rechnerisch abgedeckt, also nicht angeregt. Um den Einfluss des Gehörgangs deutlich zu machen, wurde auch mit verschwindender Gehörgangslänge gerechnet, um den Fall fehlender Gehörgänge zu simulieren.
Abb. 3.4-5: Gemeinsame Schalldruckübertragung von Gehörgang und Mittelohr.
Die realen Verläufe weichen bei
Hudde: Hörakustik: 3 Mittelohr
3-18
niedrigen und bei hohen Frequenzen weit vom Optimum ab. Nur zwischen 3 und 4 kHz wird das Optimum bis auf etwas weniger als 20 dB erreicht. Das tatsächlich erreichte Maximum entsteht durch den zusätzlichen Einfluss der λ/4-Resonanz des Gehörgangs. Durch die kombinierte Wirkung von Gehörgang und Mittelohr wird der gesamte Frequenzbereich von 800 Hz bis 4 kHz relativ gut übertragen. Das Mittelohr bewirkt niederfrequent eine Verstärkung von etwa 18 dB. Zur Beurteilung der Verläufe nach Abb. 3.4-5 sind vor allem zwei Aspekte zu beachten. Erstens bedeutet eine höhere Empfindlichkeit keineswegs unbedingt eine Verbesserung: Wäre unser Gehör tatsächlich bei niedrigen Frequenzen so empfindlich, wie es der theoretischen Grenze entspricht, so würden Geräusche durch Donner oder Überschallknalle zu Gehörschädigungen führen. Es besteht also kein Anlass für eine große Gehörempfindlichkeit bei niedrigen Frequenzen. Zweitens ist das theoretische Optimum eben tatsächlich nur theoretisch, da das Mittelohr unvermeidbar Massen und Nachgiebigkeiten enthalten muss, die bei niedrigen und hohen Frequenzen das Verhalten entscheidend bestimmen. Wegen dieser Blindelemente sind auch die in der Trommelfellreflektanz erkennbaren starken Reflexionen am Trommelfell unvermeidlich. Auch der Bezug auf die dem Schallfeld maximal entziehbare Leistung ist völlig unrealistisch, da diese durch den verschwindend kleinen Realteil der Abstrahlimpedanz des Gehörgangs ZecE bestimmt wird. Unter den realistischen Gesichtspunkten erfüllt das Mittelohr „in Zusammenarbeit“ mit dem Gehörgang die Aufgabe, möglichst viel Energie ins Vestibulum eindringen zu lassen, durchaus recht gut. 3.5 Räumliche Ossikelschwingungen, Columella-Mittelohren Die einfache Vorstellung der rotatorischen Schwingung um die durch das hintere Incusband und das vordere Hammerband gebildete Hauptachse trifft nur bei niedrigen Frequenzen hinreichend weit unter dem Resonanzbereich des Mittelohres zu. Um Ossikelschwingungen in ihrer räumlichen Ausprägung zu simulieren, benötigt man numerische Verfahren wie z. B. Finite-Elemente-Methoden. Für die Ossikelkette selbst kann man auch „verallgemeinerte Netzwerke“ verwenden, die ähnlich wie die Netzwerke der elektromechanischen Analogie darzustellen, mathematisch aber wegen der Dreidimensionalität der Schwingungen komplizierter zu behandeln sind. Die Modelle müssen mit Daten „gefüttert“ werden, die aus einer messtechnischen Erfassung dreidimensionalen Schwingungen stammen. Oberhalb von ca. 800 Hz sind deutliche Abweichungen von der einfachen rotatorischen Schwingungsform zu erkennen. Die Kette schwingt in drehenden und wiegenden Schwingungsmoden. Zu hohen Frequenzen hin bildet sich statt der Rotationsachse eher ein Rotationszentrum aus, um das sich die Fortsätze aller Ossikel (Manubrium, langer und kurzer Incus-Fortsatz) bewegen. Es stellt sich die Frage, warum das menschliche Mittelohr so kompliziert aufgebaut ist, obwohl z. B. bei Vögeln und Reptilien eine einfache stabförmige „Columella“-Verbindung zwischen Trommelfell und Innenohr die Kette ersetzt. Messungen und Berechnungen zeigen, dass dadurch unter Anderem die Empfindlich gegenüber Körperschall verringert werden kann. Noch wichtiger ist, dass sich letztlich auch eine bessere Übertragung höherer Frequenzen ergibt. Dies wäre zwar auch mit einer idealen Columella möglich. Jedoch muss eine reale Columella, um Blockierungseffekte bei nicht ganz optimaler Ausrichtung zu verhindern, so nachgiebig (mit der so genannten „Extracolumella“) angekoppelt werden, dass eine reale Columella-Extracolumella-Konstruktion letztlich der menschlichen Kette unterlegen ist. Einige Grenzfrequenzen: • Säuger: Mensch 20 kHz, Meerschweinchen 30 kHz, Katze 40 kHz, Fledermaus 50 kHz, • Reptilien; 3-5 kHz, • Vögel: Star 4 kHz, Schleiereule 8 kHz, Huhn 10 kHz.
Hudde: Hörakustik: 3 Mittelohr
3-19
Die Schleiereule (mit Columella-Mittelohr) hat allerdings ein um fast 20 dB empfindlicheres Gehör als der Mensch. Ein weiterer wichtiger Grund für die Gestalt der Ossikelkette bei Säugetieren ist die Möglichkeit, ein starkes Incudomallear-Gelenk realisieren zu können, das einen guten Überlastungsschutz liefert. Dabei hat das lateral und rotatorisch sehr flexible Incudostapedialgelenk eine erhebliche Bedeutung. Es ermöglicht vielfältige Ausgleichsbewegungen, die Verkantungseffekte im Mittelohr verhindern und trägt wesentlich zu dem günstigen Verhalten der Kette hinsichtlich Knochenschallübertragung bei. Die Flexibilität dieses Gelenks erhält ihren besonderen Sinn durch die aus der direkten Verbindungslinie Manubrium-Stapes seitlich ausgelagerte relativ schwere Masse, die durch den Hammerkopf und den Incuskörper auf beiden Seiten des Incudomalleargelenks gebildet wird.
Abb. 3.5-1: Vier Funktionsprinzipien des Mittelohrs
Zusammenfassend lassen sich beim menschlichen Mittelohr vier Funktionsprinzipien heraus kristallisieren (Abb. 3.5-1). Wegen der hohen Flexibilität der Kette und der seitlichen Auslagerung des Massenzentrums, das durch den Malleuskopf und den wesentlichen Teil des Incus-Körpers gebildet wird, verschlechtern die relativ großen Massen, die zur Realisierung eines robusten Überlastschutzes notwendig sind, die Übertragungseigenschaften nicht. Vielmehr führen sie zu einer breitbandig guten Übertragung führen. Die gute Schallübertragung auch bei hohen Frequenzen wird dadurch aufrechterhalten, dass sich die Schwingungsformen mit der Frequenz deutlich verändern. Dies führt gleichzeitig zu einer geringen Parameterempfindlichkeit der Übertragung: leichte Veränderungen der Geometrie oder der mechanischen Parameter ändern die Übertragung kaum. Bei niedrigen und mittleren Frequenzen unterstützt das seitlich ausgelagerte Massenzentrum die Entstehung rotatorischer Vibrationen um eine Achse oder gar einen Punkt nahe dem Massenzentrum. Bei niedrigen Frequenzen verhindert das ausgelagerte Massenzentrum, dass hohe Trägheitskräfte auf das StapesKöpfchen wirken (Stoßisolation). Das "biomechanische Design" des menschlichen Mittelohrs macht offenbar aus der Not eine Tugend: Die mangelnden biologischen Möglichkeiten, präzise Lager und Führungen zu realisieren, werden überwunden durch einen ausgeklügelten Einsatz von Flexibilität und Massenverteilung.