11
6-SISTEMAS
DE
REFERENCIA
Y
SISTEMAS
DE
COORDENADAS
6.1 SISTEMAS DE REFERENCIA 6.2 SISTEMAS DE COORDENADAS 6.3 CONFIGURACIÓN DE UN SISTEMA FÍSICO 6.4 SISTEMAS FÍSICOS EN MOVIMIENTO 6.5 CINEMÁTICA ELEMENTAL DE LA PARTÍCULA 6.1 Sistemas de referencia En mecánica se entiende por movimiento el cambio con el tiempo de la posición espacial de un cuerpo. La posición del cuerpo en cuestión es una p o s i c i ó n r e l a t i v a , definida con relación a otros cuerpos. El concepto de posición absoluta, que seria la posición de un cuerpo en un "espacio absoluto", sin ninguna referencia a los otros cuerpos, carece de
sentido. Un conjunto de cuerpos gue permanecen en reposo r e l a t i v o y gue se u t i l i z a n como r e f e r e n c i a para e s t u d i a r el movimiento de o t r o s cuerpos e s llamado alaterna de r e f e r e n c i a . Asi, al estudiar los movimientos que ocurren en la superficie de la Tierra, se acepta el entorno local-una colección de objetos ligados a la Tierra en reposo relativocomo el sistema de referencia para observar y medir los cambios de posición de los otros cuerpos. (3,6) Carece de sentido afirmar que dos eventos diferentes y no simultáneos se producen en vm único y mismo pvmto del espacio si no se precisa el sistema de referencia utilizado. Sea, por ejemplo, un hombre que viaja en el interior de vm vehículo en movimiento; en un instante dado, el hombre saca un libro de su maletín, y al cabo de un rato lo coloca de nuevo en e l miamo l u g a r . Puede decirse que las dos acciones han ocurrido en el mismo lugar si se ha escogido el interior del vehículo como sistema de referencia. Pero si se ha escogido la superficie de la Tierra como sistema de referencia, los dos eventos en cuestión ocurren en lugares diferentes. ( ¿ Carece también de sentido afirmar que dos sucesos que ocurren en lugares diferentes son simultáneos si no se precisa el sistema de referencia utilizado? ) (6,4) Un sistema de referencia se supone siempre dotado de vm conjvmto de v a r i l l a a r l g l d a a para medir longitudes y de un conjunto de r e l o j e a para medir intervalos de tiempo. Por reloj entendemos todo cuerpo o sistema de cuerpos que sea la base de un proceso periódico utilizado para medir el tiempo. Como ejemplos de procesos periódicos se pueden
IZ
citar las oscilaciones de amplitud constante de un péndulo, la rotación de la Tierra alrededor de su eje con relación al Sol o a una estrella, las oscilaciones de vm átomo que pertenece a una red cristalina, etc. Es claro que la escogencia de un sistema particular de referencia a l estudiar el movimiento de un objeto es asunto de gusto o v-:onveniencia, pero es a menudo ventajoso usar un sistema de referencia en el cual la descripción del movimiento sea más simple. (6) 6.2 Sistemas de coordenadas Ahora bien. para realizar mediciones de desplazamiento en un sistema de referencia,
posición y es preciso
definir un a l a t e r n a d e c o o r d e n a d a a de algún tipo, y un o r i g e n
de c o o r d e n a d a a . Como el espacio de nuestra exper iencia tiene tres dimensiones debemos en general espec ificar tres cantidades separadas para establecer la posición de un punto con respecto al origen escogido. La elección de 1 sistema de coordenadas y de su origen depende del problema que se tenga entre manos. Si ligamos al sistema de referencia un conjunto de tree ejes perpendiculares entre si, la posición de una partícula puede ser definida por tres números que son las coordenadas x,y,z dol pvmto ocupado por ella. Estas coordenadas pueden combinarse para definir el v e c t o r de p o s i c i ó n *? -un segmento de recta trazado desde el origen de coordenadas h a e t a el pvmto considerado. Las coordenadas x,y,z son las proyecciones del vector de posición sobre los tres ejes coordenados. Así, se escribirá
? = xt + yJ + zJ donde i, 3*1 k son los v e c t o r e s u n i t a r i o s orientados a lo largo de los ejes X,Y,Z. Este sistema de coordenadas ortogonales es denominado sistema de coordenadas c a r t e s i a n a s y se escoge casi siempre d e x t r ó g l r o o de mano derecha; es decir, los vectores unitarios cumplen las siguientes relaciones:
1.5=0 5-1t=o -6.1=0
í.l=i l.í=i
i.ti
relaciones de ortonormalidad
13
;
-
lxí=0
ixh=k
r=o
'jXK=í
relaciones que definen el carácter dextróglro de la terna de verseros *!, J , "%.
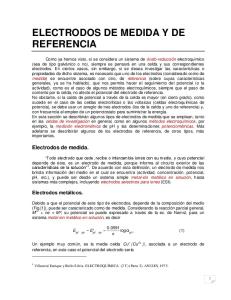
lxt=3' E=0 Se puede estudiar la posición de una partícula en el espacio tridimensional usando otros sistemas de coordenadas, siendo de muy amplio uso en física e ingeniería las coordenadas esféricas y las coordenadas cilindricas. La localización de un punto sobre la superficie de una esfera muestra la aplicación más elemental de las coordenadas esféricas. *'>
Coordenadas Esféricas
(r,« ,9)
Coordenadas Cilindricas
(R.9 . z)
Y
Punto localizado por coordenadas angulares (longitud y latitud) sobre una esfera. Cuando la partícula está confinada a moverse en un plano, el vector do posición r puode expresarse por medio de dos coordenadas cartesianas (x,y) o por medio de las coordenadas polares (r,©). , _ / Y ' —í
-
-+-"Jx^ -j- i—
> v^
4-i-4- i-l- ' 1
-h-14-iH-t- ---
Coordenadas cartesianas planas
Coordenadas polares planas
14
6.3 Configuración de un sistema físico Consideremos un sistema físico formado por un número cualquiera de partículas, y un sistema de referencia dotado de vm sistema de coordenadas cartesianas OXYZ con respecto del cual se hacen las mediciones de los cambios sufridos por el sietema físico. Se denomina c o n f i g u r a c i ó n del sistema material al conjunto de las posiciones relativas de las diversas partículas entre sí. (1) Sean IPI , rj los vectores de posición de dos partículas cualesquiera del sistema con respecto del origen del sistema de referencia elegido; el vector de posición de la partícula J con respecto de la partícula i, rji, estará dada por la expresión rj 1 = rj - ri . En esta forma, si se conoce la posición de todas las partículas del sistema en un instante dado con respecto al origen del sistema de referencia, se conoce la configuración del sistema - el conjunto de posiciones relativas l ^ j í - en ese instante. Es claro, además, que "?ji = -^fij en el mismo instante. 6.4 Sistenas físicos en movimiento El estudio del movimiento de un sistema en su aspecto puramente geométrico, procediendo a su descripción sin considerar los efectos de movimiento que surgen de la acción mutua entre los cuerpos, se denomina C i n e m á t i c a . Cuando la acción mutua entre los cuerpos es tomada en cuenta, la ciencia del movimiento es llamada C i n é t i c a , y cuando se le dedica especial atención a la fuerza como causa de los cambios en el movimiento, es llamada D i n á m i c a . (1) Para describir el movimiento de un sistema material es preciso considerar, por un lado, los cambios que se suceden en la configuración del sistema al transcurrir el tiempo (expansiones, contracciones, flujos, acercamientos, rotaciones), y por otro, su movimiento como un todo con respecto del sistema de referencia elegido. La partícula constituye el sistema material más simple del cual podemos estudiar su movimiento: puesto que carece de partes, o lo que es lo mismo, las distancias entre sue partes no entran en consideración, únicamente efectúa un
15 movimiento de translación las partículas sólo se transladan en el espacio, y carece de sentido decir que una partícula rota o se deforma. Cuando el sistema físico en estudio puede tratarse como un cuerpo rígido, no cambian las posiciones relativas de las partículas que lo conforman, y en consecuencia, además de transladarao, puede efectuar movimientos de rotación alrededor de algún eje - translación y rotación son los movimientos característicos de los cuerpos rígidos. Los sólidos deformables y los fluidos pueden además sufrir deformaciones - sólidos que se dilatan y contraen, gases que se expanden, líquidos que se derraman. Mas, como todo sistema físico puede pensarse como un sistema de partículas (discreto o continuo), el estudio del movimiento de una partícula es el primer paso en el estudio del movimiento de los sistemas físicos. 6.5 Cinemática elemental de la partícula Al estudiar el movimiento de una partícula material con respecto a un sistema de referencia, se define su posición en el instante t mediante el vector de posición "rít), el cual varía con el tiempo al moverse la partícula. 'X.
En cada instante de tiempo la partícula ocupa una posición l^ít) en el espacio tridimensional euclidiano. El conjunto de todos los puntos extremos del vector "FCt) constituye la t r a y e c t o r i a de la partícula. Ahora, si "Ttti) y "rtta) son los vectores de posición de la partícula en dos instantes cualesquiera ti y ts, la diferencia de los dos vectores de posición define el deaplazamiento de la partícula durante el intervalo de tiempo (ti,t2). Este desplazamiento se mide "en línea recta" sin considerar la curvatura de la trayectoria. /S?{tí,tz)
=~?(t2)-7(tl)
16 El cociente entre el transcurrido es la v e l o c i d a d tiempo (ti.tz):
desplazamiento y el tiempo media durante el intervalo de
(ti,t2) =?(t2)r7(tl) = A r . t2-tl
Z\t
Evidentemente, esta ecuación considera solamente el efecto total, pero no las posibles variaciones de velocidad durante el tiempo considerado. Para obtener la velocidad Instantánea, ee decir, la velocidad en un instante cualquiera, como tx. se argumenta como sigue: si se hace que el instante ta se aproxime cada vez más al instante ti, so disminuye cada vez más la probabilidad de que haya variaciones de velocidad en el intervalo de tiempo (ti,t2). El valor limite de la velocidad media •,í.— ' \ (ti,t2) cuando t2 tiende a ti es /
*"
\ la velocidad instantánea instante ti. ~v(ti) = lim 'pftg)-'r(tl^ = lim / ^ y en cualquier instante t. t2-ti t2->ti z\t->o y \ t
en
el
v(t) = dx dt La velocidad es, sin duda, un vector pues aparece matemáticamente como un cociente entre el vector desplazamiento y la magnitud escalar tiempo; pero lo es, sobre todo, de acuerdo con su significado físico, puesto que tiene un módulo y una dirección: su módulo, llamado r a p i d e z , es la distancia recorrida E>or unidad de tiempo a lo largo de la curva; su dirección es la de la posición límite del vector desplazamiento cuando ts tiende a ti, es decir, la de la tangente a la curva en el punto correspondiente. Una manera simple de expresar el vector velocidad es definiendo un vector unitario 13% que tenga la dirección de la tamgente a la trayectoria y escribiendo
l^^"^
•^ = vilí;
La rapidez v puede calcularse así: si longitud del arco recorrido por la partícula intervalo de tiempo de longitud /\t,
/ \ B ee durante
la el
17
V = lim /\t->0
/\B =
Z\t
ds dt
Kt. vector v(t) puede variar de un punto a otro de la trayectoria: si la dirección de v no varíe, la trayectorifi es rectilínea, y si además no cambia la rapidez, el movimiento es uniforme y r e c t i l í n e o . Si la dirección de la velocidad cambia al transcurrir el tiempo, ol movimiento es
curvilíneo.
El cambio de velocidad entre dos instantes ti y t2 está dado por la diferencia de los vectores velocidad: Z\v(tl,t2) = VÍt2) - V ( t l ) .
Esta operación incluye los cambios en la magnitud de la velocidad así como los cambios en su dirección. Para determinar gráficamente el cambio de velocidad se debe desplazar paralelamente uno de los dos vectores, de forma que coincidan los orígenes de ambos vectores (una translación paralela no modifica el vector). ^^•)
\/X.
vHu^
V .y.) b.^
V(.-t.
La a c e l e r a c i ó n media durante un intervalo de tiemp^o cualquiera (ti,t2) se obtiene dividiendo la variación de la velocidad por el tiempo corresE>ondiente: (ti,t2) = yX.t2J^y(tj.l = Z j i X ( t i , t z ) t2-tl 7\t El paso
al límite,
aceleración instantánea
cuando tz
a = lim At->0
tiende a
Z\Y = ilV
At
dt
ti, define la
18 La dirección del vector aceleración os la dirección límite del vector cambio de velocidad /Av cuando t2 tiende a ti, razón por la cual la aceleración eetá siempre dirigida hacia la parte cóncava de la curva. .yv"*») •
_^
Si únicamente cambia la magnitud de la velocidad, lá aceleración a tiene la misma dirección quo la velocidad v, o dirección contraria, según se trate de aumentos o disminuciones de la rapidez. Si únicamente cambia la dirección de la velocidad, el vector aceleración es perpendicular al vector velocidad, es decir, perpendicular a la tangente y se llama aceleración normal. ( normal = perpendicular )
En el caso general de variación tanto de la magnitud como de la dirección de la velocidad, se tendrá una componente tangencial y una componente normal de la aceleración. La aceleración total será la composición vectorial de estas dos componentes.
\