Scora/Boriboonsomsin/Barth ______________________________________________________________________________ ECO-FRIENDLY NAVIGATION SYSTEM DEVELOPMENT FOR HEAVY-DUTY TRUCKS
George Scora College of Engineering - Center for Environmental Research and Technology University of California at Riverside 1084 Columbia Ave, Riverside, CA 92507, USA Phone: (951) 781-5044, Fax: (951) 781-5790 E-mail:
[email protected] Kanok Boriboonsomsin College of Engineering - Center for Environmental Research and Technology University of California at Riverside 1084 Columbia Ave, Riverside, CA 92507, USA Phone: (951) 781-5792, Fax: (951) 781-5790 E-mail:
[email protected] Matthew Barth College of Engineering - Center for Environmental Research and Technology University of California at Riverside 1084 Columbia Ave, Riverside, CA 92507, USA Phone: (951) 781-5782, Fax: (951) 781-5790 E-mail:
[email protected]
[6 Table and 6 Figures: 3,000 words] [Text 4383 words] Word count: 7383 words Paper for the 92th Annual Meeting of Transportation Research Board Washington, D.C. 2013
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth ______________________________________________________________________________ ABSTRACT Heavy-duty trucks are a critical component of the U.S. goods movement system; however, they consume a large amount of fuel and emit significant pollutant and greenhouse gas emissions. The trucking industry is always looking for any measure to improve their operations and reduce fuel consumption, including efficient routing. Many existing fleet management and routing systems are based on minimizing total miles traveled which does not necessarily minimize fuel consumption or emissions, particularly under congestion and in areas having significant changes in road grade. In this paper, we describe new Eco-Friendly Navigation (EFNav) algorithms that were developed specifically to minimize fuel consumption and emissions from heavy-duty trucks. An EFNav mesoscale model was developed from a rich set of truck energy and emissions data collected by UC-Riverside’s heavy-duty Mobile Emissions Laboratory (MEL) and a robust data set simulated for a wide range of operating conditions using CE-CERT’s heavy-duty truck energy and emissions model. The mesoscale model is the basis of the EFNav routing algorithm and provides a more accurate projection of fuel use than the standard average speed based estimation by accounting for vehicle mass and road grade. A prototype implementation of the eco-routing system was performed for a heavily loaded class-8 heavy-duty truck. It was shown that the navigation system, with real-time traffic information, was able to estimate projected fuel use to within 7.5% over the test routes and simulation work showed that the variance in fuel use between an empty and fully loaded vehicle was as much as 240% over the selected route.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
3
______________________________________________________________________________
1. INTRODUCTION Many businesses transport goods between a set of locations. It is important to manage these operations efficiently to reduce operating costs and to ensure that the pickups and deliveries meet certain criteria such as the capacity constraints of clients and the company. In the U.S., a significant portion of goods is transported by heavy-duty trucks. These trucks consume a large amount of fuel each year, primarily due to the weight of goods they transport and their high annual mileage. In fact, fuel costs are one of the major components of total truck operating costs. The trucking industry, therefore, is always looking for ways to improve operations and reduce the amount of fuel consumed by their truck fleets. It is important to note that any measures that reduce fuel consumption will also result in a proportional reduction in greenhouse gas emissions (e.g., carbon dioxide), as well as reductions in criteria pollutant emissions (e.g., oxides of nitrogen and particulate matter); and thus, benefit the environment. One way of reducing fuel consumption from trucking operations is to perform the routing and scheduling efficiently. There are several commercially available software packages that allow truck routes to be constructed, taking into account numerous variables including the driver hours-of-service rules, pick-up and delivery windows, vehicle size constraints, vehicle-product compatibility, vehicle-loading dock compatibility, vehicle route restrictions, and many others. These software packages use sophisticated optimization models to solve this so called vehicle routing problem (VRP). The key objective of these optimization models is to minimize the mileages traveled by trucks. It is important to point out that in most cases, a shortest-distance route will also minimize fuel consumption and emissions (e.g. when all routes have similar conditions). However, in many other cases, this is not necessarily true. A shortest-distance route may include roadway sections with steep grades, requiring more energy for the truck to climb the hills while producing more emissions in the process. The route may also have a truck travel through heavily congested roadways, resulting in longer time spent and higher fuel consumed. Similarly, a shortest-time route does not ensure the minimum fuel consumption or emissions (a shortest-time route is usually calculated based on typical vehicle speeds on different roadway types, for example, 60 mph for freeways, 35 mph for arterials, etc.). A shortest-time route may have a truck travel longer distances, albeit on less congested roadways. Traveling at high speeds for longer distances will result in higher fuel consumption (and emissions) compared to a more direct route at lower speeds. This is especially true for heavy duty trucks whose power-to-weight ratio is low (1), (2). Various other parameters such as meteorology parameters and road type are also expected to have an effect on fuel consumption and emissions; however, this work focuses on road grade and vehicle weight since the effect of these two parameters is known to be substantial. The focus of this paper is on recently developed Eco-Friendly Navigation (EFNav) algorithms designed specifically for Heavy-Duty Trucks (HDT). With the EFNav-HDT system, a truck driver will have a choice of selecting not only a shortest-distance or shortest-time route, but also a route that minimizes the fuel consumed and/or emissions produced for that particular trip.
2. EFNAV-HDT APPLICATION DEVELOPMENT The EFNav-HDT application builds upon previous eco-routing research carried out at CECERT (1),(2),(3) for light duty vehicles (LDV) and consists of several components: 1) a Dynamic Roadway Network (DynaNet), which is a digital map of roadway network that
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
4
______________________________________________________________________________ integrates real-time traffic information from multiple sources; 2) an energy and emissions mesoscale model, which is a set of algorithms for a heavy-duty truck that produces energy and emission cost factor estimates for any combination of vehicle load, road grade and average vehicle speed; 3) a routing engine, which consists of optimization algorithms used for calculating optimal routes; and 4) a user interface that receives origin/destination inputs from the user and displays route maps to the user based on various criteria. Each of these components is integrated to estimate EFNav routes. As part of this research project, the LDV routing application was modified to support HDT route modeling, most notably with the inclusion of road grade and vehicle weight in all areas of the application. The DynaNet database was updated with link-by-link grade information; the user interface was updated to incorporate vehicle weight; and the mesoscale emission/fuel cost factor model was updated include the HDT parameters: road grade and vehicle weight.
2.1. Mesoscale Energy/Emissions Model Development for Heavy-Duty Trucks A new mesoscale energy and emission model for HDT was developed to support EFNavHDT route selection. The model calculates, for each link on the network, energy and emission cost factors that are used by the routing engine to compare routes. The new model provides a more accurate projection of energy use than the standard average speed based estimation by accounting for two important parameters that affect power: vehicle mass and road grade. The energy consumption and emissions production of a vehicle are related to the power requirement at the vehicle’s wheels. There are several factors which determine this power requirement and they fall into two general categories: the physical characteristics of the vehicle and the trajectory or operation of the vehicle. A vehicle’s physical characteristics include aerodynamic shape, frontal area, tire-road friction and vehicle mass. These characteristics determine some of the major frictional forces that a vehicle encounters during real-world operation. Vehicle weight is an important physical characteristic to consider since it can vary substantially. This is especially true for HDT which can range in weight from roughly 15,000 lbs. to 80,000 lbs. depending on payload. Vehicle trajectory characteristics such as vehicle speed and road grade are important factors that significantly influence vehicle power requirements. The developed mesoscale modeling algorithm relates fuel consumption with the key parameters of vehicle weight, vehicle speed and road grade for a particular vehicle. The modeling algorithm also accounts for the effects of these parameters on one another. This is important since, for example, the effect of vehicle speed on fuel consumption changes depending on road grade and vehicle weight (4). To account for the interactions of individual variables, Multiple Linear Regression (MLR) modeling is used with linear and non-linear interaction terms such as the example in equation 1. Yi = b0 + b1v + b2v2 + b3w + b4w2 + b5g + b6g2+ b7vw + b6vwg …
(1)
where: Y i v, w, g b1, …, bn
TRB 2013 Annual Meeting
= predicted energy and emission variables = fuel, CO2, CO, HC, NOx, PM = explanatory values such as velocity, weight, grade = regression parameters
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
5
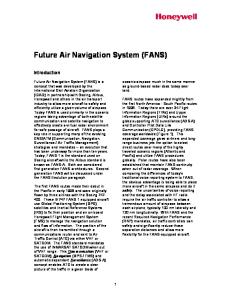
______________________________________________________________________________ Development of the mesoscale modeling algorithm requires a comprehensive database covering all combinations of the key parameters for a particular vehicle. Since such a comprehensive data set is not available, the mesoscale modeling algorithm was developed based on a simulated data set generated from CE-CERT’s microscale emission model CMEM (5),(6),(7) calibrated for the test vehicle. The CMEM calibration results in an R2 of 0.95 and a RMSE of 1.5 g/s on the calibration data set. Figure 1 shows the results of the calibrated model on an independent validation data set of nearly 1 hour of on-road activity and fuel data recorded from the vehicle’s CAN bus using CE-CERT’s Mobile Emission Lab (MEL) (8),(9). The validation results show that the model performs just as well on the validation data set. These results do not account for errors introduced by unknown conditions such as wind and varying road surface conditions.
Figure 1. Microscale model validation results for EFNav vehicle. Top plot presents scatterplot of modeled vs. measured second-by-second fuel use. Bottom plot presents time series of modeled vs. measured second-by-second fuel use.
The set of simulated data was developed using a novel approach in which measured vehicle activity traces with various average speeds were used to estimate fuel use and emissions using a microscale emission model across different combinations of vehicle weight and constant road grade for the cycle (10) as depicted in Figure 2. The vehicle weight range that was modeled was 20,000 lbs. to 80,000 lbs. and the road grade range was -8% to 8%.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
6
______________________________________________________________________________
Figure 2. Schematic showing emission modeling data set development based on activity, vehicle weight and road grade.
The modeled data set, which contains over 3,800 combinations of average vehicle speed, grade and vehicle mass, was used to develop the mesoscale emission algorithm. The data set was expanded to include all second and third order terms for the three parameters as well as all interaction terms up to the third order. This step increased the data set from 3 independent terms to 63 terms. Parameter fitting was performed using stepwise regression in both Matlab and the R statistical programming language. A model for the data set was determined using 6 parameters, an intercept value and a minimum value. The fuel model in the calibration data set had an R2 of 0.88 and a RMSE of 155.4 grams fuel/mile. The equation for the model is presented in equation 2 and the terms for the model are given in Table 1. fuel = intercept + a1∙m + a2∙g + a3∙g∙m + a4∙g2∙m + a5∙v + a6∙v2
(2)
where: m g v intercept a1, …, a6
= vehicle mass = road grade = vehicle velocity = equation intercept = modeling coefficients
Table 1. Fuel model intercept, minimum and coefficients a1 to a6.
Intercept
Minimum
a1
a2
a3
a4
a5
a6
7.14E+02
2.30E+01
9.82E-03
4.34E+00
2.86E-03
2.04E-04
-2.84E+01
2.82E-01
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
7
______________________________________________________________________________ Results of the calibrated mesoscale model on an independent validation data set are presented in Figure 3. The results show that the model performance remains similar to that of the calibration data with an R2 of 0.87 and an RMSE of 196.5. The total error across the validation data set was 2.02%. A logarithmic transformation was considered in order to avoid negative results; however, the associated regressions were not as strong and a minimum fuel cutoff point was used instead. The validation of the model in Figure 3 is based on mesoscale data; however the model can also be applied with success at a higher resolution. Further discussion of the mesoscale energy and emission model development and validation can be found in (10).
Figure 3. Parity plot of the mesoscale model validation results for EFNav vehicle.
3. EFNAV-HDT FUEL CONSUMPTION VALIDATION TESTING As part of this research, the performance of the EFNav-HDT system was evaluated using a real-world test scenario. The key objective of the EFNav-HDT application is to optimize truck routing to minimize some of the negative environmental effects associated with transportation namely fuel consumption and associated GHG emissions. The optimization of routes based on fuel consumption requires the accurate estimation of fuel use across links in a roadway network. The mesoscale fuel model was integrated into the EFNav application to provide a more accurate projection of fuel use than the standard average speed based estimation by accounting for roadway grade and vehicle mass, two important parameters affecting engine load and consequently fuel consumption.
3.1. Methodology For this work, a fuel minimized route from the Port of Long Beach (POLB) to Fontana California was determined for a 72,000 lb. test vehicle using the web based EFNav-HDT application. The predicted route was used by the test vehicle and data provided by the run was compared with data from the EFNav-HDT application. The test route is shown in Figure 4. The origin and destination points for the test scenario were chosen to reflect common trucking origin and destination points. The POLB is the second busiest port in the nation (11) and receives heavy truck traffic. The area in and around Fontana is home to numerous warehouses, distribution centers and small manufacturers, making it a popular HDD truck destination. There are various highway routing options between the ports and the Fontana area which make that origin/destination pair useful for EFNav route analysis. The predicted route was based on realtime traffic data at the start of the test which was on a weekday morning at 10:30 am.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
8
______________________________________________________________________________
Figure 4. CE-CERT’s EFNav web application interface.
The test truck is described in Table 2. It was weighed down by a flatbed trailer loaded with six 7,800 lb. K-rails for a combined payload weight of nearly 72,000 lbs. The test truck was instrumented with a data logger that records selected parameters at a frequency of 1 Hz from the truck’s ECM following the J1939 vehicle bus standard. The data logger also collects streaming data from an attached GPS unit at each second. Table 2. EFNav test vehicle details Engine Make
Engine Model
Engine Displacement
Rated Power
Engine Year
Tractor Weight
Trailer Weight
Odometer
-
-
liters
hp@RPM
year
lbs.
lbs.
miles
Caterpillar
C15
14.7
500
2,000
15,760
72,000
42,963
Test Location
on-road
3.2. Results and Discussion Comparison data for the test trip with measured data is presented in Figure 5. Figure 5a) shows the comparison of the EFNav predicted speed and the measured speed for the test route by distance. The blue line shows the measured speed, the red line shows the general traffic speed for the route as available from the DynaNet database at the start of travel time and the green line shows the same real-time general traffic speed adjusted by 0.82 to estimate truck speeds (12). General traffic speed supplied by the DynaNet database for this application was obtained from GIS data provider, NAVTEQ. The comparison shows that in this case, the given speeds at the start of travel time were a good indicator of trip speeds throughout the test run with a few notable
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
9
______________________________________________________________________________ deviations. The EFNav application can be updated repeatedly to reroute based on more recent data, but for this analysis only the initial route was considered. Figure 5b) shows the travel time comparison as a function of distance for the measured data and for the DynaNet data for the test route. This data shows that the time on the network is overestimated by almost 11%. The rise in both the truck and general traffic travel time around the 30 mile mark are a result of the decrease in travel speed at that distance on the route, as seen in Figure 5a). A comparison of measured grade data and data from the DynaNet network are presented in the third plot in Figure 5c) for reference. The grade data from the DynaNet network is the average grade on a link with links being anywhere from 25 feet to 1.2 miles in length. Measured grade is approximated from GPS data for every second. Figure 5d) compares the cumulative fuel consumption predicted by the EFNav-HDT application using real-time average speed data over the entire test route against data from the CMEM model using measured second-by-second vehicle speed, acceleration and grade. This indicates that the EFNav-HDT application overestimates fuel use by about 7.5% for the test trip in relation to the CMEM calculation. This plot also shows that the EFNav-HDT cumulative fuel consumption profile matches well with the fuel consumption profile based on measured trajectory data, showing similar sensitivity to grade along the route. The strong performance of the EFNav-HDT model in predicting fuel consumption over a route indicates that the EFNavHDT model application should perform well comparing routes based on fuel use.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
10
______________________________________________________________________________
Figure 5. EFNav-HDT model comparisons against measured data; a) vehicle speed by distance for; b) travel time by distance; c) road grade by distance; d) fuel by distance for.
A comparison of EFNav-HDT mesoscale model fuel predictions along the test route for varying conditions is presented in Figure 6. This demonstrates the sensitivity of the EFNav-HDT application to the operational parameters of grade and weight. The blue line shows the EFNavHDT mesoscale model fuel prediction at a test weight of 72,000 lbs. using the link based network grade. The red line presents the same prediction at a minimum test weight of 20,000 lbs. and the green line presents the same prediction at a maximum test weight of 80,000 lbs. These values show that the difference in fuel prediction due to weight change alone can vary by as much as 240%. The magenta line presents the same prediction as the base EFNav-HDT case with the exception that road grade is set to zero. The results show that in this case the inclusion of road grade decreases the fuel prediction by 13% and the resulting distance based fuel use rate is much more constant.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
11
______________________________________________________________________________
Figure 6. Mesoscale model sensitivity to operational parameters of grade and weight.
4. EVALUATION OF EFNAV-HDT PERFORMANCE The purpose of this research component is to evaluate the benefit of EFNav-HDT route selection in comparison to more traditional routing criteria such as route distance or travel time. The analysis in this section relies on over 500,000 simulated route calculations across multiple vehicle weights, origin/destination points and days using historical traffic data.
4.1. Methodology For this analysis, several origin/destination points in Southern California were selected and route optimization calculations were performed for all possible route combinations between the selected points. The resulting data was analyzed and is presented in Section 4.2. Selection of origin/destination points was limited to or near freeways primarily in the greater Los Angeles area and is based on typical truck origins/destinations and routes. The selected points used for this analysis are listed in Table 3. Points selected include ports, various rail yards, warehouse areas and major truck corridors in and out of the LA basin and surrounding areas. There are 18 points which serve as both the origin and destination for trips resulting in 153 route combinations. For each origin/destination pair, fuel minimized and travel time minimized routes were generated for every 15 minutes, for 24 hours a day and for an 8 day test period between September 26th and October 3rd in 2011. Information recorded from the simulation runs includes the date, the origin and destination points, EFNav-HDT estimates for fuel use and emissions, estimated time traveled based on historical speed data on the network, and percent overlap between the fuel minimized and travel time minimized routes. Simulation results are discussed in the next section.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
12
______________________________________________________________________________ Table 3. Origin and destination points used in evaluation. Name
City
Latitude
Longitude
POLA/POLA - 47 Freeway & Navy Way
Long Beach
33.753912
-118.252
395 & I15 - North Eastern Route
Hesperia
34.40752
-117.4
Reservoir St - Warehouses
Chino
34.023465
-117.731
I10 @ 79 - Eastern Route
Beaumont
33.92635
-116.977
60 @ Archibald Ave - Warehouses
Ontario
34.03128
-117.593
I5 North - Western Route
Santa Clarita
34.362628
-118.555
Fontana Truck Yards
Fontana
34.070016
-117.489
134/101 Route to Ventura
Casa Conejo
34.180352
-118.911
I5 Route to San Diego
San Juan Capistrano
33.502518
-117.658
I15 Route to San Diego
Temecula
33.481179
-117.142
Los Angeles Transportation Center Rail yard
Los Angeles
34.059792
-118.215
Commerce/Hobart Rail Yard
Commerce
34.005738
-118.176
Watson Rail Yard
Wilmington
33.791557
-118.256
Dolores Rail Yard
Wilmington
33.823363
-118.229
City of Industry Rail Yard
City of Industry
34.000094
-117.931
Colton Rail Yard
Colton
34.063061
-117.37
Mira Loma Rail Yard
Mira Loma
34.016339
-117.525
San Bernardino Rail Yard
San Bernardino
34.102645
-117.303
4.2. Results and Discussion The purpose of the research presented in this section is to evaluate the benefit of EFNavHDT for route choice. Typical route choice criteria for many drivers using navigation systems is travel time since this has an immediate impact and since time is considered valuable. This is especially true for the trucking industry which runs on tight time schedules. With the availability of EFNav, some focus is expected to shift, in part, to limiting fuel consumption which is also an important factor for the trucking industry as well as drivers in general. There is less incentive for most users to minimize emissions over travel time or fuel use since there is no immediate cost to the user associated with emissions as there is with travel time and fuel use. Fortunately, emissions are strongly correlated with fuel use and minimizing fuel use can generally be expected to minimize emissions as well. A key issue that arises, however, is quantifying the trade-off between time savings and fuel savings. Results from this research present data to help address this question. Information recorded from the simulation runs includes the date, the origin and destination points, EFNav-HDT estimates for fuel use and emissions, estimated time traveled based on historical speed data on the network, and percent overlap between the fuel
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
13
______________________________________________________________________________ minimized and travel time minimized routes. From this data, the percent increase in travel time and the percent savings in fuel were calculated and the results are presented in Tables 4 to 6. Each table contains data, divided by weekday and weekend, for one of three vehicle weights. The average percent time increase and average percent fuel savings in 10 mile Euclidean distance bins are presented along with their standard deviation and the number of trips occurring in each bin. The data in Tables 4 to 6 shows that the average percent time increase and average percent fuel savings increase with increased vehicle weight. This is to be expected since heavier vehicles are more sensitive to factors affecting fuel use such as road grade and vehicle speed than a lighter vehicle. The data also shows that average percent time increase and average percent fuel savings are generally higher on the weekends relative to the weekdays. Table 4. Time increase versus fuel saving tradeoff for trips in 10 mile Euclidean distance bins for a 20k lb. truck. Weekend
Average Euclidean Distance (mi)
No. of Trips
5.3
% Time Increase
Weekday % Fuel Savings
Avg.
S.D.
Avg.
S.D.
No. of Trips
4,136
10
10
6
10
14.97
5,640
19
12
8
24.69
7,520
22
11
35.68
9,024
25
44.36
12,408
54.46
% Time Increase
% Fuel Savings
Avg.
S.D.
Avg.
S.D.
10,516
6
8
4
7
7
14,340
10
10
5
6
15
11
19,120
15
10
10
9
11
15
10
22,944
16
11
9
7
27
10
15
10
31,548
18
11
10
8
6,392
28
8
13
6
16,252
17
10
8
6
66.08
5,264
28
8
17
12
13,384
20
10
11
10
73.83
3,384
28
7
14
6
8,604
19
10
9
6
84.77
1,880
35
8
17
9
4,780
25
11
12
8
93.61
752
34
7
17
7
1,912
25
9
12
7
101.34
376
27
6
12
5
956
18
8
8
5
112.27
752
33
8
13
5
1,912
24
11
9
5
All
57,528
316
106
162
98
146,268
213
119
107
84
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
14
______________________________________________________________________________ Table 5. Time increase versus fuel saving tradeoff for trips in 10 mile Euclidean distance bins for a 50k lb. truck. Average Euclidean Distance (mi)
Weekend No. of Trips
% Time Increase
Weekday % Fuel Savings
Avg.
S.D.
Avg.
S.D.
No. of Trips
% Time Increase
% Fuel Savings
Avg.
S.D.
Avg.
S.D.
5.3
4,136
16
14
10
13
10,516
13
13
8
11
14.97
5,640
26
13
9
6
14,340
19
12
7
6
24.69
7,520
29
10
18
11
19,120
24
10
15
11
35.68
9,024
31
10
15
8
22,944
25
10
11
7
44.36
12,408
32
11
16
9
31,548
26
11
13
8
54.46
6,392
35
9
14
6
16,252
28
12
11
6
66.08
5,264
36
6
21
12
13,384
31
9
17
11
73.83
3,384
35
10
15
8
8,604
29
12
13
8
84.77
1,880
43
4
24
10
4,780
38
6
21
10
93.61
752
52
3
25
5
1,912
49
5
23
6
101.34
376
30
5
13
3
956
24
5
11
3
112.27
752
47
7
18
6
1,912
41
10
15
6
57,528
412
102
198
97
146,268
347
115
165
93
All
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
15
______________________________________________________________________________ Table 6. Time increase versus fuel saving tradeoff for trips in 10 mile Euclidean distance bins for a 80k lb. truck. Average Euclidean Distance (mi)
Weekend No. of Trips
% Time Increase
Weekday % Fuel Savings
Avg.
S.D.
Avg.
S.D.
No. of Trips
% Time Increase
% Fuel Savings
Avg.
S.D.
Avg.
S.D.
5.3
4,136
18
17
12
16
10,516
16
16
11
13
14.97
5,640
31
13
11
7
14,340
24
14
9
6
24.69
7,520
32
11
20
12
19,120
28
11
18
12
35.68
9,024
36
10
16
8
22,944
32
10
14
7
44.36
12,408
36
12
18
9
31,548
32
12
16
9
54.46
6,392
40
9
16
7
16,252
34
11
14
7
66.08
5,264
41
7
24
14
13,384
37
8
21
13
73.83
3,384
41
10
18
10
8,604
37
12
16
10
84.77
1,880
47
5
28
13
4,780
42
7
26
12
93.61
752
53
3
33
5
1,912
49
5
31
5
101.34
376
37
3
15
3
956
32
5
13
3
112.27
752
50
4
23
8
1,912
45
8
21
8
57,528
462
104
234
112
146,268
408
119
210
105
All
5. CONCLUSIONS EFNav is a useful tool for increasing vehicle operation efficiency and is especially useful for the trucking industry. In order for EFNav to be successful, it has to account for not only the vehicle speed on the route, but also road grade and vehicle weight. In this work, a mesoscale energy and emission model that accounts for vehicle speed, road grade and vehicle weight, was developed and integrated in an EFNav application. The resulting EFNav-HDT application was implemented in a real-world test situation and the test results were compared with those of the EFNav-HDT application. The results show that the EFNav-HDT application was within 7.5% of the fuel use value calculated from measured activity data and that both cumulative fuel use values track very well over the route. This demonstrates that EFNav supported by the developed mesoscale energy model is an effective tool for fuel based route minimization. EFNav-HDT predictions for the test route at various vehicle weights and with and without road grade show that fuel predictions can vary by as much as 240 % between a fully loaded truck and an empty truck and that the omission of road grade reduces the fuel estimation by as much as 12.7% for the selected route. Simulation runs were also performed with the EFNav-HDT application for selected points in Southern California using historical activity data. The results were analyzed to assess the benefit of EFNav-HDT routing for fuel savings versus the more traditional time minimized routing.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
16
______________________________________________________________________________ Results from the simulation show that the percent of travel time increase and the related percent of fuel savings that may be achieved increases with an increase in the Euclidean distance between origin and destination points, increases with an increase in vehicle weight and to a lesser extent increases with weekend driving as opposed to weekday driving. ACKNOWLEDGEMENT This work was supported by the University of California Transportation Center (UCTC). The authors would like to thank Alexander Vu and Joseph Dean for their contribution to the development of the EFNav system and to the simulation work. The authors would also like to thank Joseph Menke for his contribution to the development of software for the HDT data logging equipment.
TRB 2013 Annual Meeting
Paper revised from original submittal.
Scora/Boriboonsomsin/Barth
17
______________________________________________________________________________ REFERENCES 1.
Barth, M., Boriboonsomsin, K., and Vu, A. (2007). “Environmental-friendly Navigation”, Proceedings of the 10th International IEEE Conference on Intelligent Transportation Systems, Seattle, WA.
2.
Barth, M. and Boriboonsomsin, K. (2009). “Environmentally beneficial intelligent transportation systems.” Proceedings of the 12th IFAC Symposium on Control in Transportation Systems, Redondo Beach, CA, September 2-4.
3.
Boriboonsomsin, K., Barth, M., Zhu, W., & Vu, A. (2010). ECO-Routing Navigation System based on Multi-Source Historical and Real-Time Traffic Information. IEEE ITSC2010 Workshop on Emergent Cooperative Technologies in Intelligent Transportation Systems.
4.
Scora, G., Boriboonsomsin, K., and Barth, M. (2010). “Effects of operational variability on heavy-duty truck greenhouse gas emissions.” Proceedings of the 89th Annual Meeting of the Transportation Research Board (DVD), Washington, DC, January 10-14.
5.
Barth, M., An, F., Norbeck, J., & Ross, M. (1996). Modal emissions modeling: a physical approach. Transportation Research Record: Journal of the Transportation Research Board, No. 1520, 81-88.
6.
An, F., Barth, M., Norbeck, J., & Ross, M. (1997). Development of comprehensive modal emissions model: operating under hot-stabilized conditions. Transportation Research Record: Journal of the Transportation Research Board, No. 1587, 52-62.
7.
Barth, M., An, F., Younglove, T., Scora, G., Levine, C., Ross, M., et al. (2000, April). NCHRP Web-Only Document 122,Contractor’s final report for NCHRP Project 25-11, National Cooperative Highway Research Program. The development of a comprehensive modal emissions model.
8.
Cocker, D., Shah, S., Johnson, K., Miller, W., & Norbeck, J. (2004a). Development and Application of a Mobile Laboratory for Measuring Emissions from Diesel Engines. 1. Regulated Gaseous Emissions. Environmental Science & Technology, 38, 2182-2189.
9.
Cocker, D., Shah, S., Johnson, K., Zhu, X., Miller, W., & Norbeck, J. (2004b). Development and Appliation of a Mobile Laboratory for Measuring Emissions from Diesel Engines. 2. Sampling for Toxics and Particulate Matter. Environmental Science & Technology, 38, 6809-6816.
10. Scora, G., (2012). “Heavy Duty Diesel Particulate Matter and Fuel Consumption Modeling for Transportation Analysis”, PhD Dissertation, University of California Riverside 11. Port of Long Beach. (2011). Facts at a Glance. Retrieved October 2011, from Port of Long Beach: Green Port: http://www.polb.com/about/facts.asp 12. Boriboonsomsin, K., Zhu, W., & Barth, M. (2011). A Statistical Approach to Estimating Truck Traffic Speed and its Application to Emission Inventory Modeling. Transportation Research Record.
TRB 2013 Annual Meeting
Paper revised from original submittal.