World Applied Sciences Journal 8 (5): 555-564, 2010 ISSN 1818-4952 © IDOSI Publications, 2010
Car Suspension Control By Indirect Adaptive Interval Type -2 Fuzzy Neural Network Control 1
2
1
Tsung-Chih Lin, Mehdi Roopaei and Ming-Che Chen
1
2
Department of Electronic Engineering, Feng-Chia University, Taichung, Taiwan Department of Electrical Engineering, Fars Research and Science-Islamic Azad University, Shiraz, Iran Abstract: To control quarter-car systems, a novel indirect adaptive interval type-2 Fuzzy Neural Network (FNN) controller is developed in this paper to achieve both ride comfort and good handling. By incorporating indirect adaptive interval type-2 FNN control approach and sliding mode control, car suspension system regulation performance can be achieved based on Lyapunov stability criterion. The simulation example is given to confirm validity of the proposed design scheme. Key words: Indirect adaptive control interval type-2 fuzzy FNN car suspension system •
•
INTRODUCTION
necessary be in agreement and (iii) noisy training data. Therefore, antecedent or consequent uncertainties translate into uncertain antecedent or consequent membership functions. Type-1 FLSs are unable to handle rule uncertainties directly, when the information that is used to construct the rules in a FLS is uncertain. On the other hand, type-2 FLSs involved in this paper whose antecedent or consequent membership functions are type-2 fuzzy sets can handle rule uncertainties. A type-2 FLS is characterized by IF-THEN rules, but its antecedent or consequent sets are type-2. Hence, type-2 FLSs can be used when the circumstances are too uncertain to determine exact membership grades such as when training data are corrupted by noise [12, 13]. Since, appropriate improvements of active suspension systems have a potential to improve the ride comfort and vehicle maneuverability, this research area has remained attractive for many years. Chen et al. [14] introduced a Fuzzy Logic Controller (FLC) for an active suspension under the Sliding Mode Control (SMC) approach. The FLC was assigned to reduce the chattering of the SMC and to supervise the control performance to self-tune parameters of the control system. Yun et al. [15] also proposed a fuzzy adaptive sliding mode controller for an active suspension system with different sliding surface proposed by Chen et al. Rao and Prahlad [16] also presented a adjustable FLC to reduce the suspension acceleration and deflection to a level of a hypothetical reference model. The suspension deflection and velocity were the two input variables to the FLC while the desired force was its output. Fernando and Viassolo [17] presented a controller consisting of two control loops to minimize
The main role of a car suspension system is to improve the ride comfort and to better the handling property. A traditional spring-damper suspension is currently being replaced by either a semi-active or active suspension system. In order to improve the capability of active suspension systems, many research studies have been investigated on the design and control of active suspension system recently [1-4]. FNN controller is defined as an FNN logic system equipped with an adaptation algorithm. Moreover, FNN is constructed from a collect of fuzzy IF-THEN rules using fuzzy logic principles and the adaptation algorithm adjusts the free parameters of the FNN based on the numerical experiment data. Like the conventional adaptive control, the adaptive FNN control has direct and indirect FNN adaptive control categories. Direct adaptive FNN control has been discussed which the adaptive FNN controller uses fuzzy logic systems as controller. Hence linguistic fuzzy control rules can be directly incorporated into the controller. Also, indirect adaptive FNN control has been proposed which the indirect FNN controller uses fuzzy descriptions to model the plant. Hence, fuzzy IF-THEN rules describing the plant can be directly incorporated into the indirect FNN controller [5-11]. In general, the rule uncertainty will be existed in following three possible ways, (i) the words that are used in antecedents and consequents of rules can mean different things to different people; (ii) consequents obtained by polling a group of experts will often be different for the same rule because the experts will not
Corresponding Author: Dr. Mehdi Roopaei, Department of Electrical Engineering, Fars Research and Science-Islamic Azad University, Shiraz, Iran
555
World Appl. Sci. J., 8 (5): 555-564, 2010
the vehicle body’s acceleration and to avoid hitting the suspension limit. The outer loop was the same as that proposed by Rao and Prahlad but an additional inner loop was designed to deal with the non-linear hydraulic actuator. More recent research results can be found in references [18-21]. This paper is structured as follows. Car suspension system is given in section II. A brief description of interval type 2 fuzzy neural network is introduced in section III. Indirect adaptive interval type-2 fuzzy neural network control for chaos synchronization between two different chaotic systems is presented in section III. Simulation example to demonstrate the performances of the proposed method is provided in section IV. Section V gives the conclusions of the advocated design methodology.
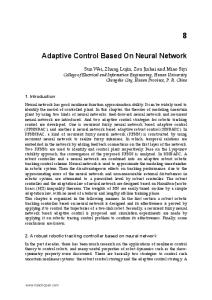
Fig. 1: One-quarter-car model
QUARTER-CAR MODEL
where:
In this paper, we are considering a quarter car model with two degrees of freedom. This model uses a unit to create the control force between body mass and wheel mass. The motion equations of the car body and the wheel are as follows: mb z b =− f a k1 (z b − z w ) − c s (z b − z w ) mw zw = − f a + k1 (z b − z w ) −k 2 (z w − z r )
x1 = zb body displacement x2 = x 1 = z b absolute velocity of the body x3 = zw wheel displacement = x= z w absolute velocity of the wheel 4 x 3 Then the motion equations of the quarter car model for the active suspension can be written in state space form as follows:
(1)
mb mw k1 k2 fa cs zr zb zw
With
1 0 0 0 Body mass 250 kg k c k cs Wheel mass 35 kg 1 s 1 − − mb mb mb mb Spring constant (stiffness) of the body 16 000 N/m A = = B 0 0 0 1 Spring constant (stiffness) of the wheel 160 000 k N/m k + k2 1 − 1 0 0 Desired force by the cylinder m m w w Damping ratio of the damper 980 Ns/m Road displacements In general, in the space state Body displacement defined by Wheel displacements
s(x,t) = − kx
To model the road input let us assume that the vehicle is moving with a constant forward speed. Then the vertical velocity can be taken as a white noise process which is approximately true for most of real roadways. To transform the motion equations of the quarter car model into a space state model, the following state variables are considered: x = [x1 , x2 , x3 , x4 ]T
(3)
x = A.x + B.f a + F.z r
with the following constants and variables which respect the static equilibrium position:
0 1 mb = F 0 1 − mw
0 0 0 (4) k2 m w
a sliding surface is (5)
where k = [k1 , k2 , k3 , k4 ] in which the ki ’s are all real and are chosen such that 4
h(r) = ∑ k ir ( i−1 ) i= 1
is a Hurwitz polynomial where r is a Laplace operator. The control problem will be considered as the state
(2) 556
World Appl. Sci. J., 8 (5): 555-564, 2010
vector x remaining on the sliding surface s (x, t) = 0 for all t≥0. The sliding mode control process can be classified into two phases, the approaching phase with s (x, t) ≠ 0 and the sliding phase with s (x, t) = 0 for initial error x(0)=0. In order to guarantee that the trajectory of the state vector x will translate from the approaching phase to the sliding phase, the sufficient condition s(x,t) ⋅ s(x,t) ≤ − η s , η > 0
(6)
must be satisfied. Two type of control law must be derived separately for those two phases described above. In the sliding phase, it implies s (x, t) = 0 and s ( x , t ) = 0 . In order to force the system dynamics to stay on the sliding surface, the equivalent control u eq can be derived as follows: If A, B and Zr are known, taking the derivative of the sliding surface with respective to time, we get
Fig. 2: Interval type-2 fuzzy set with uncertain mean In order to make things simpler and easier to compute meet and join operations, the secondary MFs of an interval type-2 FLS are all unity which leads finally to simplify type reduction. The 2-D interval type-2 Gaussian membership function (MF) with uncertain mean m∈[m1 , m2 ] and a fixed deviation σ is shown in Fig. 2.
s = − kx = − k(Ax + Bf a + FZ r ) = − kAx − kBf a − kFZ r = 0
(7)
fa is control input and for simplicity in notation we call it as u, therefore u=fa. Therefore, the equivalent control can be obtained as −1 ueq (kAx + k F Zr ) = kB
1 x − m 2 µ A (x) = exp − ,m ∈ [ m1, m 2 ] 2 σ
(8)
It is obvious that the type-2 fuzzy set is in a region bounded by an upper MF and a lower MF denoted as µ A (x) and µ A (x) , respectively and is called a Foot of
Let f (x, t) = kAx + kFZr. On the contrary, in the approaching phase, s (x, t) ≠ 0, a approaching-type control u ap must be added in order satisfy the sufficient condition (6) and the complete sliding mode control will be expressed as u= u eq + uap ,u ap = η∆ sgn(s)
Uncertainty (FOU). In the meantime, the firing strength Fi for the ith rule can be an interval type-1 set expressed as :
(9)
(11)
f i Fi = i f
where η∆ ≥η